
Механический фильтр — это фильтр обработки сигналов, обычно используемый вместо электронного фильтра на радиочастотах . Его назначение такое же, как и у обычного электронного фильтра: пропускать один диапазон частот сигнала, но блокировать другие. Фильтр воздействует на механические вибрации, которые являются аналогом электрического сигнала. На входе и выходе фильтра преобразователи преобразуют электрический сигнал в эти механические вибрации, а затем обратно.
Все компоненты механического фильтра аналогичны различным элементам электрических цепей. Механические элементы подчиняются математическим функциям, идентичным соответствующим электрическим элементам. Это позволяет применять методы анализа электрических сетей и проектирования фильтров к механическим фильтрам. Теория электротехники разработала большую библиотеку математических форм, которые создают полезные частотные характеристики фильтра , и разработчик механических фильтров может использовать их напрямую. Необходимо только установить соответствующие значения механических компонентов, чтобы получить фильтр с идентичной реакцией на электрический аналог.
Стальные сплавы и железо-никелевые сплавы являются обычными материалами для компонентов механических фильтров; никель иногда используется для входных и выходных соединений. Резонаторы в фильтре, изготовленные из этих материалов, необходимо подвергнуть механической обработке, чтобы точно отрегулировать их резонансную частоту перед окончательной сборкой.
Хотя значение механического фильтра в этой статье заключается в том, что он используется в электромеханической роли, можно использовать механическую конструкцию для прямой фильтрации механических вибраций или звуковых волн (которые также по сути являются механическими). Например, фильтрация звуковых частот в конструкциях громкоговорителей может быть достигнута с помощью механических компонентов. В электрических приложениях, помимо механических компонентов, соответствующих своим электрическим аналогам, необходимы преобразователи для преобразования между механической и электрической областями. В этой статье представлен репрезентативный выбор широкого спектра форм компонентов и топологий механических фильтров.
Теория механических фильтров была впервые применена для улучшения механических частей фонографов в 1920-х годах. К 1950-м годам механические фильтры производились как автономные компоненты для применения в радиопередатчиках и высокотехнологичных приемниках. Высокий «коэффициент качества» Q , которого могут достичь механические резонаторы, гораздо более высокий, чем у полностью электрической LC-цепи , сделал возможным создание механических фильтров с превосходной селективностью . Хорошая избирательность, важная для радиоприемников, сделала такие фильтры весьма привлекательными. Современные исследователи работают над микроэлектромеханическими фильтрами — механическими устройствами, соответствующими электронным интегральным схемам.



Элементы пассивной линейной электрической сети состоят из катушек индуктивности , конденсаторов и резисторов , которые обладают свойствами индуктивности , упругости (обратной емкости ) и сопротивления соответственно. Механическими аналогами этих свойств являются соответственно масса , жесткость и демпфирование . В большинстве конструкций электронных фильтров в корпусе фильтра используются только элементы индуктивности и конденсатора (хотя фильтр может быть оконечен резисторами на входе и выходе). Сопротивления отсутствуют в теоретическом фильтре, состоящем из идеальных компонентов, и возникают только в практических конструкциях как нежелательные паразитные элементы . Аналогично, механический фильтр в идеале должен состоять только из компонентов, обладающих свойствами массы и жесткости, но на самом деле также присутствует некоторое демпфирование. [1]
Механическими аналогами напряжения и электрического тока в этом типе анализа являются, соответственно, сила ( F ) и скорость ( v ) и представляют собой формы сигнала. Исходя из этого, механический импеданс можно определить через мнимую угловую частоту jω , что полностью соответствует электрической аналогии. [2] [3]
Схема, представленная в таблице, известна как импедансная аналогия . Принципиальные схемы, созданные с использованием этой аналогии, соответствуют электрическому импедансу механической системы, видимой электрической цепью, что делает ее интуитивно понятной с точки зрения электротехники. Существует также аналогия подвижности , [a] в которой сила соответствует току, а скорость соответствует напряжению. Это дает одинаково действительные результаты, но требует использования обратных величин электрических аналогов, перечисленных выше. Следовательно, M → C , S → 1/л, D → G , где G — электрическая проводимость (обратная величина сопротивлению , если нет реактивного сопротивления ). Эквивалентные схемы, созданные по этой схеме, аналогичны, но представляют собой формы с двойным импедансом , при которых последовательные элементы становятся параллельными, конденсаторы становятся индукторами и так далее. [6] Принципиальные схемы, использующие аналогию с мобильностью, более точно соответствуют механическому устройству схемы, что делает ее более интуитивно понятной с точки зрения машиностроения. [7] Помимо применения к электромеханическим системам, эти аналогии широко используются для анализа в акустике. [8]
Любой механический компонент неизбежно будет обладать как массой, так и жесткостью. В электрическом смысле это переводится как LC-цепь, то есть цепь, состоящая из катушки индуктивности и конденсатора, следовательно, механические компоненты являются резонаторами и часто используются как таковые. Все еще возможно представить катушки индуктивности и конденсаторы как отдельные элементы с сосредоточенными параметрами в механической реализации, минимизируя (но никогда полностью не устраняя) нежелательные свойства. Конденсаторы могут быть изготовлены из тонких длинных стержней, то есть масса сведена к минимуму, а податливость максимизирована. С другой стороны, индукторы могут быть изготовлены из коротких и широких частей, которые максимизируют массу по сравнению с податливостью детали. [9]
Механические детали действуют как линия передачи механических вибраций. Если длина волны коротка по сравнению с деталью, то описанная выше модель с сосредоточенными элементами больше не подходит, и вместо нее необходимо использовать модель с распределенными элементами . Механические распределенные элементы полностью аналогичны электрическим распределенным элементам, и разработчик механического фильтра может использовать методы проектирования электрических фильтров с распределенными элементами . [9]
Конструкция механического фильтра была разработана путем применения открытий, сделанных в теории электрических фильтров, к механике. Однако очень ранним примером (1870-е годы) акустической фильтрации был « гармонический телеграф », возникший именно потому, что электрический резонанс был плохо изучен, но механический резонанс (в частности, акустический резонанс ) был хорошо знаком инженерам. Эта ситуация не продлилась долго; Электрический резонанс был известен науке задолго до этого, и вскоре инженеры начали создавать полностью электрические конструкции фильтров. Однако в свое время гармонический телеграф имел определенное значение. Идея заключалась в том, чтобы объединить несколько телеграфных сигналов на одной телеграфной линии с помощью того, что сейчас будет называться мультиплексированием с частотным разделением , что позволит значительно сэкономить затраты на установку линии. Ключ каждого оператора активировал вибрирующий электромеханический язычок, который преобразовывал эту вибрацию в электрический сигнал. Фильтрация у принимающего оператора достигалась с помощью аналогичного язычка, настроенного точно на ту же частоту, который только вибрировал и производил звук при передачах оператора с идентичной настройкой. [10] [11]
Версии гармонического телеграфа разработали Элиша Грей , Александр Грэм Белл , Эрнест Меркадье [б] и другие. Его способность действовать как преобразователь звука в электрическую область и обратно послужила вдохновением для изобретения телефона. [10] [11]
Как только основы анализа электрических сетей начали закладываться, вскоре идеи теории комплексного импеданса и проектирования фильтров были перенесены в механику по аналогии. Кеннелли , который также отвечал за введение комплексного импеданса, и Вебстер были первыми, кто распространил концепцию импеданса на механические системы в 1920 году. [12] Механический адмиттанс и связанная с ним аналогия с подвижностью появились намного позже и принадлежат Файерстоуну в 1932 году. [ 13] [14]
Недостаточно просто разработать механическую аналогию. Это можно было бы применить к проблемам, которые полностью относятся к механической области, но для механических фильтров с электрическим применением необходимо также включить в аналогию преобразователь. Пуанкаре (1907) [15] был первым, кто описал преобразователь как пару линейных алгебраических уравнений, связывающих электрические переменные (напряжение и ток) с механическими переменными (сила и скорость). [15] Эти уравнения могут быть выражены в виде матричной зависимости во многом так же, как z-параметры двухполюсной сети в теории электротехники, которым это полностью аналогично:
где V и I представляют собой напряжение и ток соответственно на электрической стороне преобразователя.
Вегель в 1921 году был первым, кто выразил эти уравнения в терминах механического импеданса, а также электрического импеданса. Элемент представляет собой механический импеданс разомкнутой цепи, то есть импеданс, создаваемый механической стороной преобразователя, когда ток не поступает на электрическую сторону. Элемент , наоборот, представляет собой зажатый электрический импеданс, то есть импеданс, действующий на электрическую сторону, когда механическая сторона зажата и не может двигаться (скорость равна нулю). Остальные два элемента описывают прямую и обратную передаточные функции преобразователя соответственно. Как только эти идеи были реализованы, инженеры смогли распространить электрическую теорию на механическую область и проанализировать электромеханическую систему как единое целое. [12] [16]

Первым применением этих новых теоретических инструментов стало фонографическое воспроизведение звука. Постоянная проблема ранних конструкций фонографов заключалась в том, что механические резонансы в звукоснимателе и механизме передачи звука вызывали чрезмерно большие пики и провалы в частотной характеристике, что приводило к плохому качеству звука. В 1923 году Харрисон из Western Electric Company подал патент на фонограф, механическая конструкция которого была полностью представлена в виде электрической цепи. Рупор фонографа представлен в виде линии передачи и является резистивной нагрузкой для остальной части схемы, в то время как все механические и акустические части — от иглы звукоснимателя до рупора — преобразуются в сосредоточенные компоненты в соответствии с импедансом. аналогия. Полученная схема представляет собой лестничную топологию последовательных резонансных контуров, соединенных шунтирующими конденсаторами. Это можно рассматривать как схему полосового фильтра . Харрисон разработал значения компонентов этого фильтра так, чтобы они имели определенную полосу пропускания, соответствующую желаемой полосе пропускания звука (в данном случае от 100 Гц до 6 кГц), и ровную характеристику. Преобразование этих значений электрических элементов обратно в механические величины позволило получить характеристики механических компонентов с точки зрения массы и жесткости, которые, в свою очередь, можно было перевести в физические размеры для их производства. Полученный фонограф имеет ровную частотную характеристику в полосе пропускания и свободен от ранее возникших резонансов. [17] Вскоре после этого Харрисон подал еще один патент, используя ту же методологию для телефонных датчиков передачи и приема. [18]

Харрисон использовал теорию фильтров изображений Кэмпбелла , которая была самой продвинутой теорией фильтров, доступной в то время. В этой теории конструкция фильтра рассматривается, по сути, как задача согласования импедансов . [19] Более продвинутая теория фильтров была применена к этой проблеме Нортоном в 1929 году в Bell Labs . Нортон следовал тому же общему подходу, хотя позже он описал Дарлингтону разработанный им фильтр как «максимально плоский». [1] Механическая конструкция Нортона предшествовала статье Баттерворта , которого обычно считают первым, кто описал электронный максимально плоский фильтр . [20] Уравнения, которые Нортон дает для своего фильтра, соответствуют фильтру Баттерворта с одинарной нагрузкой, то есть управляемому идеальным источником напряжения без импеданса, тогда как в текстах чаще всего приводится форма для фильтра с двойной нагрузкой и резисторами на обоих концах. заканчивается, что затрудняет распознавание дизайна таким, какой он есть. [21] Еще одна необычная особенность конструкции фильтра Norton связана с последовательным конденсатором, который представляет собой жесткость диафрагмы . Это единственный последовательный конденсатор в представлении Нортона, и без него фильтр можно было бы рассматривать как прототип ФНЧ . Нортон выносит конденсатор из корпуса фильтра на вход за счет введения в схему замещения трансформатора (рисунок Нортона 4). Для достижения этой цели Нортон использовал здесь преобразование импеданса « обращением L ». [22]
Окончательное описание предмета этого периода содержится в статье Максфилда и Харрисона 1926 года. Там они описывают не только то, как механические полосовые фильтры могут быть применены к системам воспроизведения звука, но также применяют те же принципы к системам записи и описывают значительно улучшенную головку для резки дисков. [23] [24]
Современные механические фильтры для промежуточных частот (ПЧ) были впервые исследованы Робертом Адлером из Zenith Electronics , который построил фильтр 455 кГц в 1946 году. [25] Идею подхватила компания Collins Radio Company , которая начала первое серийное производство механических фильтров из 1950-е годы и далее. Первоначально они были разработаны для телефонных приложений с частотным разделением каналов, где использование высококачественных фильтров имеет коммерческое преимущество. Точность и крутизна переходной полосы приводят к уменьшению ширины защитной полосы , что, в свою очередь, приводит к возможности втиснуть больше телефонных каналов в один и тот же кабель. Эта же функция полезна в радиопередатчиках по той же причине. Механические фильтры быстро также завоевали популярность в каскадах ПЧ ОВЧ/УВЧ-радиостанций высококлассных радиоприемников (военных, морских, любительских радиостанций и т.п.), производимых Collins. Им было отдано предпочтение в радиоприменении, поскольку они могли обеспечить гораздо более высокую добротность , чем эквивалентный LC-фильтр. Высокая добротность позволяет создавать фильтры с высокой избирательностью , что важно для различения соседних радиоканалов в приемниках. Они также имели преимущество в стабильности как перед LC-фильтрами, так и перед монолитными кристаллическими фильтрами . Самой популярной конструкцией для радиоприложений были крутильные резонаторы, поскольку радиочастотная частота обычно находится в диапазоне от 100 до 500 кГц. [26] [27]

В механических фильтрах используются как магнитострикционные , так и пьезоэлектрические преобразователи. В последних конструкциях предпочтение отдается пьезоэлектрическим преобразователям, поскольку пьезоэлектрический материал также можно использовать в качестве одного из резонаторов фильтра, что позволяет уменьшить количество компонентов и тем самым сэкономить пространство. Они также позволяют избежать чувствительности к посторонним магнитным полям преобразователя магнитострикционного типа. [28]
Магнитострикционный материал — это материал, который меняет форму под действием магнитного поля. И наоборот, при искажении он создает магнитное поле. Магнитострикционный преобразователь требует обмотки проводящего провода вокруг магнитострикционного материала. Катушка либо индуцирует магнитное поле в преобразователе и приводит его в движение, либо улавливает индуцированный ток от движения преобразователя на выходе фильтра. Также обычно необходимо иметь небольшой магнит для смещения магнитострикционного материала в его рабочий диапазон. Можно обойтись без магнитов, если смещение обеспечивается на электронной стороне путем подачи постоянного тока, наложенного на сигнал, но такой подход умаляет общность конструкции фильтра. [29]
Обычными магнитострикционными материалами, используемыми для преобразователя, являются феррит или прессованный порошкообразный железо . В конструкциях механических фильтров резонаторы часто соединены стальными или никель-железными проводами, но в некоторых конструкциях, особенно старых, в качестве входных и выходных стержней может использоваться никелевая проволока. Это связано с тем, что можно намотать катушку преобразователя непосредственно на никелевый соединительный провод, поскольку никель обладает слабой магнитострикцией. Однако это не так уж и сильно, и связь с электрической цепью слабая. Эта схема также имеет недостаток вихревых токов , проблемы, которой можно избежать, если вместо никеля использовать ферриты. [29]
Катушка преобразователя добавляет некоторую индуктивность на электрической стороне фильтра. Обычно параллельно катушке добавляют конденсатор, чтобы образовался дополнительный резонатор, который можно включить в конструкцию фильтра. Хотя это не улучшит производительность в такой степени, как дополнительный механический резонатор, определённая польза есть, и катушка в любом случае должна быть там. [30]
Пьезоэлектрический материал — это материал, который меняет форму под действием электрического поля. И наоборот, при искажении он создает электрическое поле. По сути, пьезоэлектрический преобразователь изготавливается путем нанесения электродов на пьезоэлектрический материал. Ранние пьезоэлектрические материалы, используемые в преобразователях, такие как титанат бария, имели плохую температурную стабильность. Это не позволяло преобразователю работать в качестве одного из резонаторов; это должен был быть отдельный компонент. Эта проблема была решена с использованием цирконат-титаната свинца (сокращенно ЦТС), который достаточно стабилен, чтобы его можно было использовать в качестве резонатора. Другим распространенным пьезоэлектрическим материалом является кварц , который также используется в механических фильтрах. Однако керамические материалы, такие как ЦТС, предпочтительнее из-за их более высокого коэффициента электромеханической связи . [31]
Одним из типов пьезоэлектрических преобразователей является тип Ланжевена, названный в честь преобразователя, который Пол Ланжевен использовал в ранних исследованиях гидролокаторов . Это хорошо для продольных форм вибрации. Его также можно использовать в резонаторах с другими видами вибрации, если движение можно механически преобразовать в продольное. Преобразователь состоит из слоя пьезоэлектрического материала, зажатого поперек соединительного стержня или резонатора. [32]
В другом типе пьезоэлектрического преобразователя пьезоэлектрический материал вставлен продольно, обычно в сам резонатор. Этот тип хорош для крутильных режимов колебаний и называется крутильным преобразователем. [33]
Миниатюрные пьезоэлектрические резонаторы, уменьшенные с помощью методов изготовления тонких пленок , называются тонкопленочными объемными акустическими резонаторами (FBAR).
С помощью механических резонаторов можно достичь чрезвычайно высокой добротности . Механические резонаторы обычно имеют добротность 10 000 или около того, а 25 000 можно достичь в крутильных резонаторах с использованием определенного сплава никеля и железа. Это неоправданно высокий показатель для LC-цепей, добротность которых ограничена сопротивлением катушек индуктивности. [29] [35] [36]
Ранние разработки 1940-х и 1950-х годов начинались с использования стали в качестве материала резонатора. На смену им пришли сплавы никеля и железа, в первую очередь для максимизации добротности, поскольку зачастую в этом заключается основная привлекательность механических фильтров, а не в цене. Некоторые металлы, которые использовались для изготовления резонаторов механических фильтров, и их добротность показаны в таблице. [35]
Пьезоэлектрические кристаллы также иногда используются в конструкциях механических фильтров. Это особенно актуально для резонаторов, которые также действуют как преобразователи входов и выходов. [35]
Одним из преимуществ механических фильтров перед электрическими LC является то, что их можно сделать очень стабильными. Резонансную частоту можно сделать настолько стабильной, что она будет изменяться всего на 1,5 частей на миллиард (млрд) от заданного значения в диапазоне рабочих температур ( от -25 до 85 °C ), а ее средний дрейф со временем может составлять всего 4 миллиарда на миллиард. в день. [37] Эта температурная стабильность является еще одной причиной использования никель-железа в качестве материала резонатора. Изменения резонансной частоты (и других особенностей частотной функции) в зависимости от температуры напрямую связаны с изменениями модуля Юнга , который является мерой жесткости материала. Поэтому ищут материалы, которые имеют небольшой температурный коэффициент модуля Юнга. В общем, модуль Юнга имеет отрицательный температурный коэффициент (материалы становятся менее жесткими с повышением температуры), но добавление небольших количеств некоторых других элементов в сплав [c] может привести к образованию материала с температурным коэффициентом, который меняет знак от отрицательного через ноль до положительный с температурой. Такой материал будет иметь нулевой температурный коэффициент с резонансной частотой около определенной температуры. Довести точку нулевого температурного коэффициента до желаемого положения можно путем термообработки сплава. [36] [39] [40] [41]

Обычно механическая деталь может вибрировать в нескольких различных режимах , однако конструкция будет основана на определенном режиме вибрации, и разработчик предпримет шаги, чтобы попытаться ограничить резонанс этим режимом. Помимо прямого продольного режима, используются и другие, включая изгибный режим, крутильный режим , радиальный режим и режим барабанной пластинки . [42] [43]
Моды нумеруются в соответствии с количеством полуволн вибрации. В некоторых режимах наблюдается вибрация более чем в одном направлении (например, в режиме пластика, в котором их два), и, следовательно, номер режима состоит из более чем одного числа. Когда вибрация находится в одной из высших мод, на резонаторе будет несколько узлов, в которых нет движения. Для некоторых типов резонаторов это может стать удобным местом для установки механического крепления для опоры конструкции. Провода, прикрепленные к узлам, не будут влиять на вибрацию резонатора или общий отклик фильтра. На рисунке 5 некоторые возможные точки крепления показаны в виде проводов, прикрепленных к узлам.





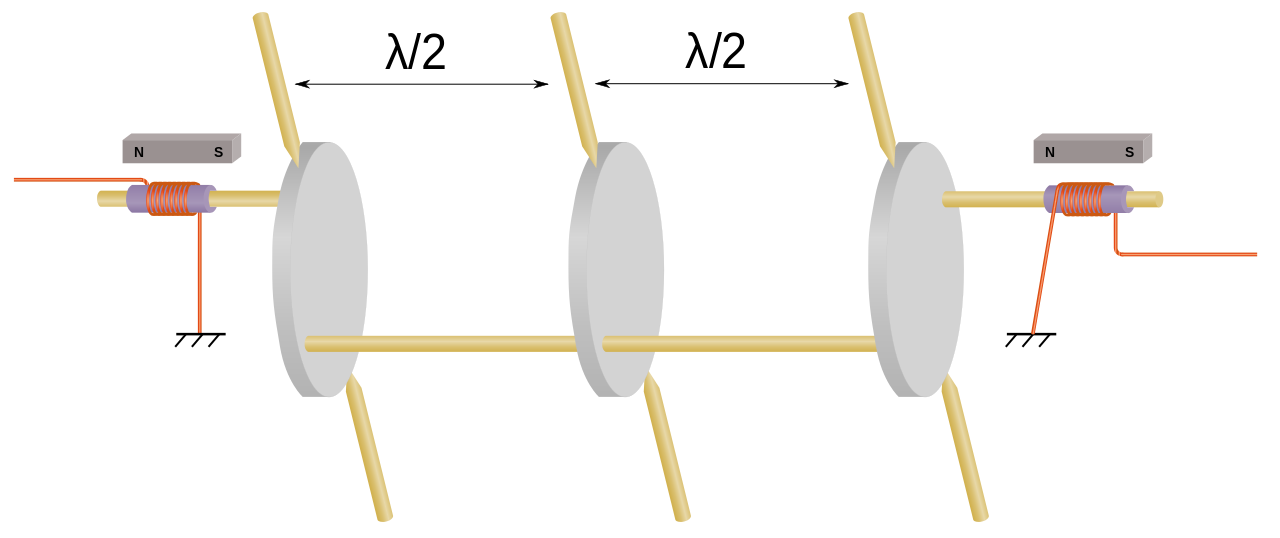
Существует множество комбинаций резонаторов и преобразователей, которые можно использовать для создания механического фильтра. Некоторые из них показаны на диаграммах. На рис. 6 показан фильтр с использованием дисковых изгибных резонаторов и магнитострикционных преобразователей. Преобразователь приводит в движение центр первого резонатора, заставляя его вибрировать. Края диска движутся в противофазе к центру, когда управляющий сигнал находится в резонансе или близок к нему, и сигнал передается через шатуны к следующему резонатору. Когда управляющий сигнал не близок к резонансу, по краям происходит небольшое движение, и фильтр отклоняет (не пропускает) сигнал. [44] На рисунке 7 показана аналогичная идея с использованием продольных резонаторов, соединенных в цепочку шатунами. На этой схеме фильтр приводится в действие пьезоэлектрическими преобразователями. С таким же успехом можно было бы использовать магнитострикционные преобразователи. [33] На рисунке 8 показан фильтр, использующий крутильные резонаторы. На этой схеме вход имеет торсионный пьезоэлектрический преобразователь, а выход — магнитострикционный преобразователь. Это было бы довольно необычно в реальной конструкции, поскольку и вход, и выход обычно имеют преобразователи одного и того же типа. Магнитострикционный преобразователь показан здесь только для демонстрации того, как продольные колебания могут быть преобразованы в крутильные и наоборот. [33] [42] [45] На рисунке 9 показан фильтр, в котором используются резонаторы режима барабанного пластика. Края дисков закреплены на корпусе фильтра (на схеме не показаны), поэтому вибрация диска находится в тех же режимах, что и мембрана барабана. Коллинз называет этот тип фильтра дисковым проволочным фильтром. [42]
Различные типы резонаторов особенно подходят для разных диапазонов частот. В целом, механические фильтры с сосредоточенными элементами всех типов могут охватывать частоты от 5 до 700 кГц, хотя механические фильтры ниже нескольких килогерц (кГц) встречаются редко. [29] Нижнюю часть этого диапазона, ниже 100 кГц, лучше всего перекрыть стержневыми изгибными резонаторами. Верхнюю часть лучше сделать с крутильными резонаторами. [42] Дисковые резонаторы барабанного пластика находятся посередине и охватывают диапазон от 100 до 300 кГц. [44]
Поведение частотной характеристики всех механических фильтров можно выразить в виде эквивалентной электрической цепи, используя описанную выше аналогию импеданса. Пример этого показан на рисунке 8b, который представляет собой эквивалентную схему механического фильтра, показанного на рисунке 8a. Элементы электрической части, такие как индуктивность магнитострикционного преобразователя, опущены, но будут учтены в полной конструкции. Последовательные резонансные цепи на принципиальной схеме представляют собой крутильные резонаторы, а шунтирующие конденсаторы представляют собой провода связи. Значения компонентов электрической эквивалентной схемы можно регулировать более или менее произвольно, изменяя размеры механических компонентов. Таким образом, все теоретические инструменты электрического анализа и проектирования фильтров могут быть применены к механическому проектированию. Любой фильтр, реализуемый в теории электричества, в принципе может быть реализован и как механический фильтр. В частности, могут быть легко реализованы популярные методы конечных элементов для идеального отклика фильтров фильтров Баттерворта и Чебышева . Как и в случае с электрическим аналогом, чем больше элементов используется, тем ближе приближение к идеалу, однако по практическим соображениям количество резонаторов обычно не превышает восьми. [44] [46]

Частоты порядка мегагерц (МГц) превышают обычный диапазон механических фильтров. Компоненты начинают становиться очень маленькими или, альтернативно, компоненты становятся большими по сравнению с длиной волны сигнала. Описанная выше модель с сосредоточенными элементами начинает разрушаться, и компоненты необходимо рассматривать как распределенные элементы . Частота, с которой происходит переход от сосредоточенного моделирования к распределенному, для механических фильтров значительно ниже, чем для их электрических аналогов. Это связано с тем, что механические вибрации распространяются со скоростью звука для материала, из которого состоит компонент. Для твердых компонентов это во много раз (х15 для никель-железа) скорость звука в воздухе ( 343 м/с ), но все же значительно меньше скорости электромагнитных волн (около 3,00×10).8 м/св вакууме). Следовательно, механические длины волн намного короче электрических длин волн для той же частоты. Из этих эффектов можно извлечь выгоду, сознательно разрабатывая компоненты как распределенные элементы, а такжеможно использоватьфильтрах с распределенными элементамиЭквивалентышлейфовитрансформаторов импедансавполне достижимы. Конструкции, в которых используется смесь сосредоточенных и распределенных элементов, называются полусосредоточенными. [47]
Пример такой конструкции показан на рисунке 10а. Резонаторы представляют собой дисковые изгибные резонаторы, аналогичные показанным на рисунке 6, за исключением того, что они возбуждаются с края, что приводит к вибрации в основной изгибной моде с узлом в центре, тогда как в конструкции, показанной на рисунке 6, питание подается в центре, что приводит к вибрация во второй изгибной моде при резонансе. Резонаторы механически прикреплены к корпусу шарнирами, расположенными под прямым углом к соединительным проводам. Шарниры должны обеспечивать свободное вращение резонатора и минимизировать потери. Резонаторы рассматриваются как сосредоточенные элементы; однако провода связи выполнены ровно на одну полуволну (λ/2) длинные и эквивалентныλ/2обрыв шлейфа в электрической схеме замещения. Для узкополосного фильтра шлейф такого типа имеет приблизительную эквивалентную схему параллельной схемы с параллельной шунтовой настройкой, как показано на рисунке 10b. Следовательно, в этой конструкции соединительные провода используются для добавления в схему дополнительных резонаторов и будут иметь лучший отклик, чем схема с сосредоточенными резонаторами и короткими связями. [47] Для еще более высоких частот можно использовать микроэлектромеханические методы, как описано ниже.
Перемычки представляют собой стержни, соединяющие между собой несмежные резонаторы. Их можно использовать для создания полюсов затухания в полосе задерживания . Преимущество этого заключается в увеличении отклонения полосы задерживания. Когда полюс размещается вблизи края полосы пропускания , это также увеличивает спад и сужает полосу перехода . Типичное влияние некоторых из них на частотную характеристику фильтра показано на рисунке 11. Мостовое соединение через одиночный резонатор (рисунок 11b) может создать полюс затухания в верхней полосе задерживания. Соединение двух резонаторов (рис. 11c) может создать полюс затухания как в верхней, так и в нижней полосе задерживания. Использование нескольких мостов (рис. 11d) приведет к появлению нескольких полюсов затухания. Таким образом, затухание полос задерживания может быть углублено в широком диапазоне частот. [48]

Способ связи несмежных резонаторов не ограничивается механическими фильтрами. Его можно применять к другим форматам фильтров, и общий термин для этого класса — фильтр с перекрестной связью . Например, каналы можно прорезать между резонаторами , взаимную индуктивность можно использовать с фильтрами дискретных компонентов, а пути обратной связи можно использовать с активными аналоговыми или цифровыми фильтрами . Этот метод также не был впервые обнаружен в области механических фильтров; самое раннее описание содержится в патенте 1948 года на фильтры, использующие резонаторы микроволнового резонатора. [49] Однако конструкторы механических фильтров были первыми (1960-е годы), кто разработал практические фильтры такого типа, и этот метод стал особенностью механических фильтров. [50]

Новой технологией механической фильтрации являются микроэлектромеханические системы (МЭМС). МЭМС — это очень маленькие микромашины , размеры компонентов которых измеряются микрометрами (мкм), но не такие маленькие, как наномашины . Эти фильтры могут быть разработаны для работы на гораздо более высоких частотах, чем традиционные механические фильтры. Эти системы в основном изготавливаются из кремния (Si), нитрида кремния (Si 3 N 4 ) или полимеров . Распространенным компонентом, используемым для фильтрации радиочастот (и в приложениях MEMS в целом), является кантилеверный резонатор. Кантилеверы — это простые механические компоненты, которые производятся практически теми же методами, которые используются в полупроводниковой промышленности; маскировка, фотолитография и травление с окончательным подрезанием для отделения кантилевера от подложки. Эта технология имеет большие перспективы, поскольку кантилеверы можно производить в больших количествах на одной подложке — примерно так же, как большое количество транзисторов в настоящее время содержится на одном кремниевом чипе. [51]
Резонатор, показанный на рисунке 12, имеет длину около 120 мкм. Изготовлены экспериментальные комплектные фильтры с рабочей частотой 30 ГГц с использованием в качестве элементов резонатора кантилеверных варакторов . Размер этого фильтра составляет около 4×3,5 мм. [52] Консольные резонаторы обычно применяются на частотах ниже 200 МГц, но в микроволновых диапазонах могут использоваться и другие конструкции, такие как микрообработанные полости. [53] С помощью этой технологии можно изготовить резонаторы с чрезвычайно высокой добротностью ; Сообщается о резонаторах изгибной моды с добротностью более 80 000 на частоте 8 МГц. [54]
Прецизионные приложения, в которых используются механические фильтры, требуют, чтобы резонаторы были точно настроены на указанную резонансную частоту. Это называется обрезкой и обычно включает в себя процесс механической обработки. В большинстве конструкций фильтров это может оказаться затруднительным, если резонаторы собраны в полный фильтр, поэтому перед сборкой резонаторы подрезаются. Обрезка производится как минимум в два этапа; грубая и тонкая, при этом каждая ступень приближает резонансную частоту к заданному значению. Большинство методов подстройки включают удаление материала из резонатора, что увеличивает резонансную частоту. Следовательно, целевая частота для этапа грубой подстройки должна быть установлена ниже конечной частоты, поскольку в противном случае допуски процесса могут привести к тому, что частота будет выше, чем может быть настроена на следующем этапе точной подстройки. [55] [56]
Самый грубый метод обрезки — шлифовка основной резонирующей поверхности резонатора; точность этого процесса составляет около ±800 ppm . Лучшего управления можно добиться, отшлифовав край резонатора, а не основную поверхность. Это имеет менее драматичный эффект и, следовательно, более высокую точность. Процессы, которые можно использовать для тонкой обрезки, в порядке возрастания точности: пескоструйная обработка , сверление и лазерная абляция . Лазерная обрезка обеспечивает точность ±40 ppm . [56] [57]
Обрезка вручную, а не машиной, использовалась на некоторых компонентах раннего производства, но теперь обычно встречается только во время разработки продукта. Доступные методы включают шлифование и опиливание . Также можно добавить материал в резонатор вручную, уменьшив тем самым резонансную частоту. Одним из таких методов является добавление припоя , но он не подходит для промышленного использования, поскольку припой имеет тенденцию снижать высокую добротность резонатора. [55]
В случае МЭМС-фильтров обрезка резонаторов вне фильтра невозможна из-за комплексного характера конструкции устройства. Однако обрезка по-прежнему является обязательным требованием во многих приложениях MEMS. Для этого можно использовать лазерную абляцию, но доступны методы осаждения материала, а также его удаления. Эти методы включают лазерное или ионно-индуцированное осаждение . [58]




