

Мобильная система обслуживания ( MSS ) — это роботизированная система на борту Международной космической станции (МКС). Запущенная на МКС в 2001 году, она играет ключевую роль в сборке и обслуживании станции; она перемещает оборудование и материалы по станции, поддерживает астронавтов, работающих в космосе, и обслуживает приборы и другие полезные нагрузки, прикрепленные к МКС, и используется для внешнего обслуживания. Астронавты проходят специальную подготовку, чтобы иметь возможность выполнять эти функции с различными системами MSS.
MSS состоит из трех компонентов:
Система может перемещаться по рельсам на интегрированной ферменной конструкции на верхней части предоставленной США тележки Mobile Transporter, на которой размещена базовая система MRS . Программное обеспечение управления системой было написано на языке программирования Ada 95. [1]
MSS был разработан и изготовлен компанией MDA (ранее подразделения MacDonald Dettwiler Associates, называвшиеся MDA Space Missions , MD Robotics и ранее называвшиеся SPAR Aerospace) для Канадского космического агентства в качестве вклада в Международную космическую станцию.

.jpg/1280px-Canadarm2_Latching_End_Effector_and_joints_(ISS052e000402).jpg)

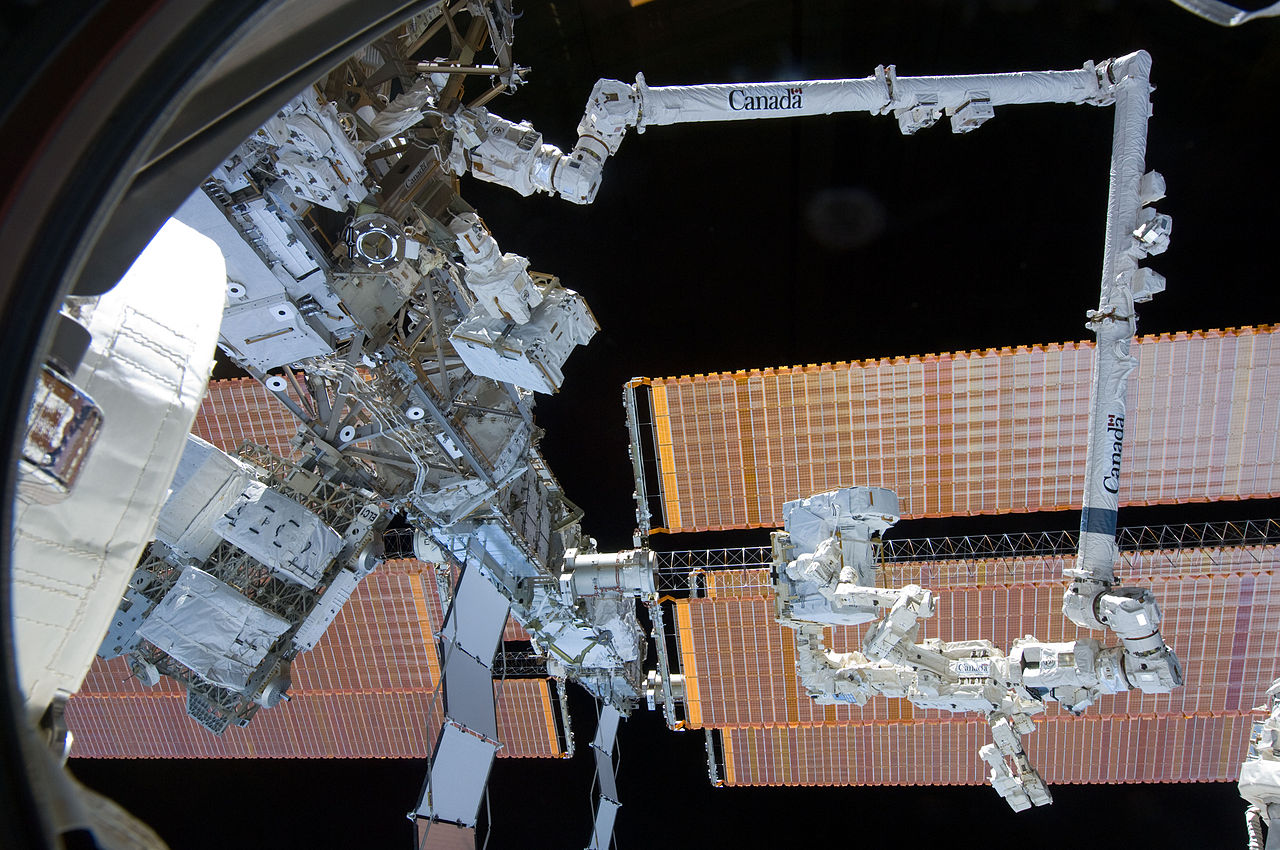

Официально известная как система дистанционного манипулятора космической станции (SSRMS). Запущенная на STS-100 в апреле 2001 года, эта рука второго поколения является более крупной и усовершенствованной версией оригинальной Canadarm космического челнока . Canadarm2 имеет длину 17,6 м (58 футов) в полностью выдвинутом состоянии и имеет семь моторизованных сочленений (шарнир «локтя» посередине и три вращающихся сочленения на каждом из концов «запястья/плеча»). Она имеет массу 1800 кг (4000 фунтов) и диаметр 35 см (14 дюймов) и изготовлена из титана. Рука способна обрабатывать большие полезные грузы весом до 116 000 кг (256 000 фунтов) и могла помочь при стыковке космического челнока. Она самоперемещаемая и может двигаться в разные стороны, чтобы достичь многих частей космической станции движением, похожим на дюймовый червь . В этом движении он ограничен только количеством Power Data Grapple Fixtures (PDGF) на станции. PDGF, расположенные вокруг станции, обеспечивают питание, данные и видео для руки через любой из двух ее защелкивающихся концевых эффекторов (LEE). Рука также может перемещаться по всей длине фермы космической станции с помощью мобильной базовой системы.
Помимо перемещения по станции, рука может перемещать любые объекты с помощью захватного приспособления . При строительстве станции рука использовалась для перемещения больших сегментов на место. Ее также можно использовать для захвата беспилотных кораблей, таких как SpaceX Dragon , космический корабль Cygnus и японский транспортный корабль H-II (HTV), которые оснащены стандартным захватным приспособлением, которое Canadarm2 использует для захвата и причаливания космического корабля. Рука также используется для отчаливания и освобождения космического корабля после использования.
Операторы на борту видят, что они делают, глядя на три ЖК-экрана роботизированной рабочей станции (RWS). MSS имеет два блока RWS: один в модуле Destiny , а другой в Cupola . Только один RWS управляет MSS одновременно. RWS имеет два набора джойстиков управления: один вращательный ручной контроллер (RHC) и один поступательный ручной контроллер (THC). В дополнение к этому есть панель дисплея и управления (DCP) и ноутбук портативной компьютерной системы (PCS).
В последние годы большинство роботизированных операций управляются дистанционно диспетчерами полета на земле в Центре управления полетами Кристофера К. Крафта-младшего или из Космического центра Джона Х. Чепмена Канадского космического агентства . Операторы могут работать посменно для выполнения задач с большей гибкостью, чем когда это делают операторы экипажа на борту, хотя и в более медленном темпе. Операторы-астронавты используются для критических по времени операций, таких как захваты транспортных средств для посещения и поддерживаемая робототехникой внекорабельная деятельность .
Незадолго до 12 мая 2021 года в Canadarm2 попал небольшой обломок орбитального мусора, повредивший его тепловые покрытия и одну из штанг. [2] Его работа, по-видимому, не пострадала. [2]
Canadarm 2 также поможет пристыковать модули космической станции Axiom к МКС . [3] [4]
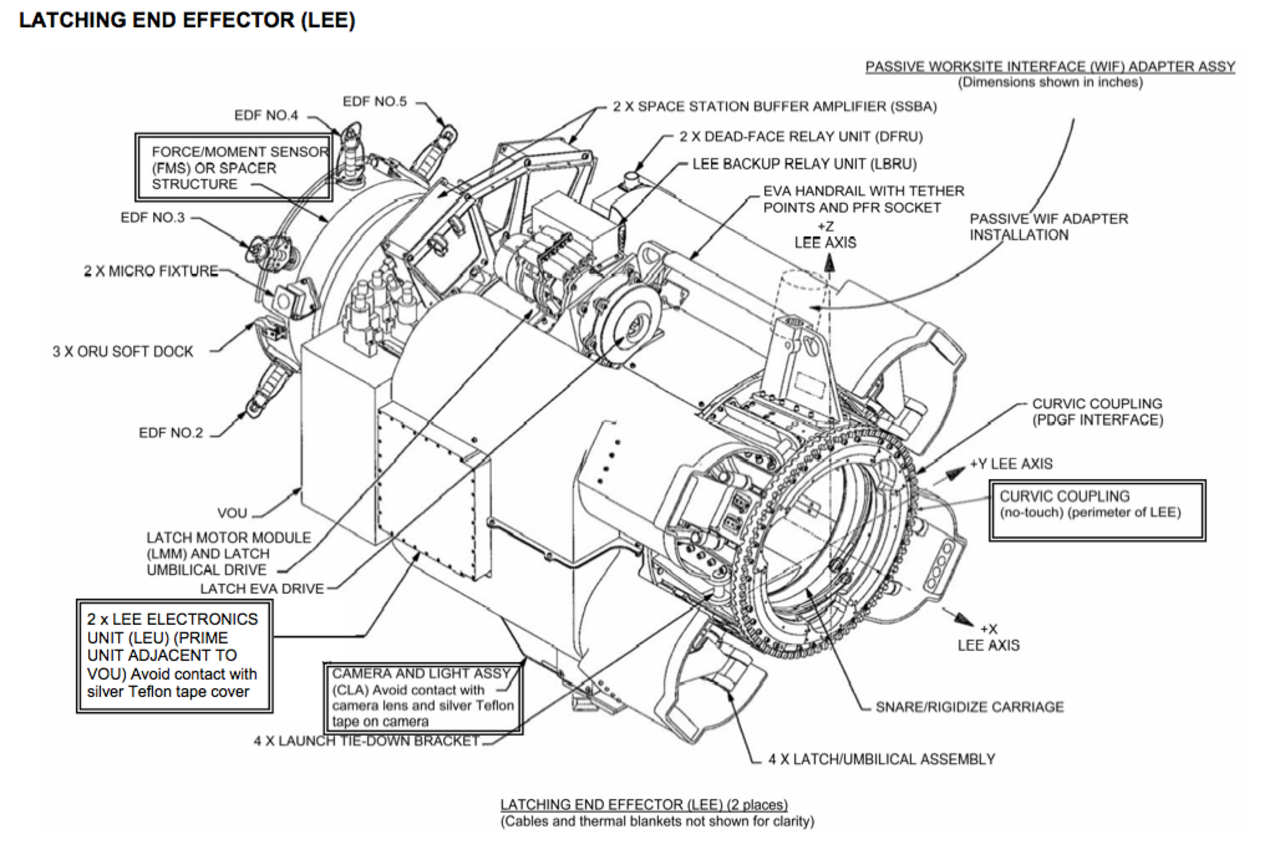

Canadarm2 имеет два LEE, по одному на каждом конце. LEE имеет 3 троса-ловушки для захвата вала захватного приспособления . [5] Еще один LEE находится на блоке размещения полезной нагрузки ORU (POA) мобильной базовой системы. LEE POA используется для временного удержания крупных компонентов МКС. Еще один находится на манипуляторе специального назначения Dexterous (SPDM, также известном как «Dextre» или «канадская рука»). Шесть LEE были изготовлены и использовались в различных местах на МКС [ требуется ссылка ] .
Специальный манипулятор Dexterous Manipulator, или « Dextre », представляет собой небольшого двурукого робота, который может крепиться к Canadarm2, МКС или мобильной базовой системе. Руки и их электроинструменты способны выполнять сложные сборочные задачи и менять орбитальные сменные блоки (ORU), которые в настоящее время обрабатываются астронавтами во время выходов в открытый космос. Хотя Canadarm2 может перемещаться по станции «гусеничным движением», он не может ничего переносить с собой, если не прикреплен Dextre. Испытания проводились в камерах моделирования космического пространства в лаборатории Дэвида Флориды Канадского космического агентства в Оттаве , Онтарио. Манипулятор был запущен на станцию 11 марта 2008 года на STS-123 .


Базовая система мобильного удаленного сервисного оператора (MBS) является базовой платформой для роботизированных рук. Она была добавлена к станции во время STS-111 в июне 2002 года. Платформа покоится на вершине мобильного транспортера [6] (установленного на STS-110 , разработанного Northrop Grumman в Карпинтерии, Калифорния ), который позволяет ей скользить на 108 метров вниз по рельсам на главной ферме станции . [7] Canadarm2 может перемещаться сама по себе, но не может одновременно нести, Dextre не может перемещаться сама по себе. MBS дает двум роботизированным рукам возможность перемещаться к рабочим площадкам по всей конструкции фермы и сходить на захватные приспособления по пути. Когда Canadarm2 и Dextre прикреплены к MBS, их общая масса составляет 4900 кг (10800 фунтов). [8] Как и Canadarm2, он был построен компанией MD Robotics и имеет минимальный срок службы 15 лет. [7] [9]
MBS оснащен четырьмя Power Data Grapple Fixtures , по одному в каждом из четырех верхних углов. Любой из них может использоваться в качестве базы для двух роботов, Canadarm2 и Dextre, а также для любой полезной нагрузки, которую они могут удерживать. MBS также имеет два места для крепления полезной нагрузки. Первое — это размещение полезной нагрузки/орбитального сменного блока (POA). Это устройство, которое выглядит и функционирует во многом как защелкивающиеся концевые эффекторы Canadarm2. Его можно использовать для парковки, питания и управления любой полезной нагрузкой с помощью захватного приспособления, при этом Canadarm2 остается свободным для выполнения чего-то другого. Другое место крепления — это общая система крепления MBS (MCAS). Это еще один тип системы крепления, которая используется для проведения научных экспериментов. [10]
MBS также поддерживает астронавтов во время внекорабельной деятельности . Он имеет места для хранения инструментов и оборудования, фиксаторов для ног, поручней и точек крепления страховочного троса, а также камеру. При необходимости астронавт даже может «ехать» на MBS, пока он движется с максимальной скоростью около 1,5 метра в минуту. [6] По обе стороны от MBS находятся средства перемещения экипажа и оборудования. Эти тележки ездят по тем же рельсам, что и MBS. Астронавты едут на них вручную во время выхода в открытый космос для транспортировки оборудования и облегчения передвижения по станции.
27 мая 2011 года была установлена стрела длиной 15,24 метра (50 футов) с поручнями и камерами видеонаблюдения, прикрепленная к концу Canadarm2.
Станция получила вторую роботизированную руку во время STS-124 , японскую систему дистанционного манипулятора экспериментального модуля (JEM-RMS). JEM-RMS в основном используется для обслуживания JEM Exposed Facility . Дополнительная роботизированная рука, европейская роботизированная рука (ERA), была запущена вместе с многоцелевым лабораторным модулем российского производства 15 июля 2021 года.
Первоначально соединенная с «Пирсом», МКС также имеет два грузовых крана «Стрела» . Один из кранов может быть выдвинут, чтобы достичь конца «Зари» . Другой может выдвинуться на противоположную сторону и достичь конца «Звезды» . Первый кран был собран в космосе во время STS-96 и STS-101 . Второй кран был запущен вместе с самим «Пирсом». Позднее краны были перемещены в стыковочный отсек «Поиск» и модуль «Заря» .


{kind=link}