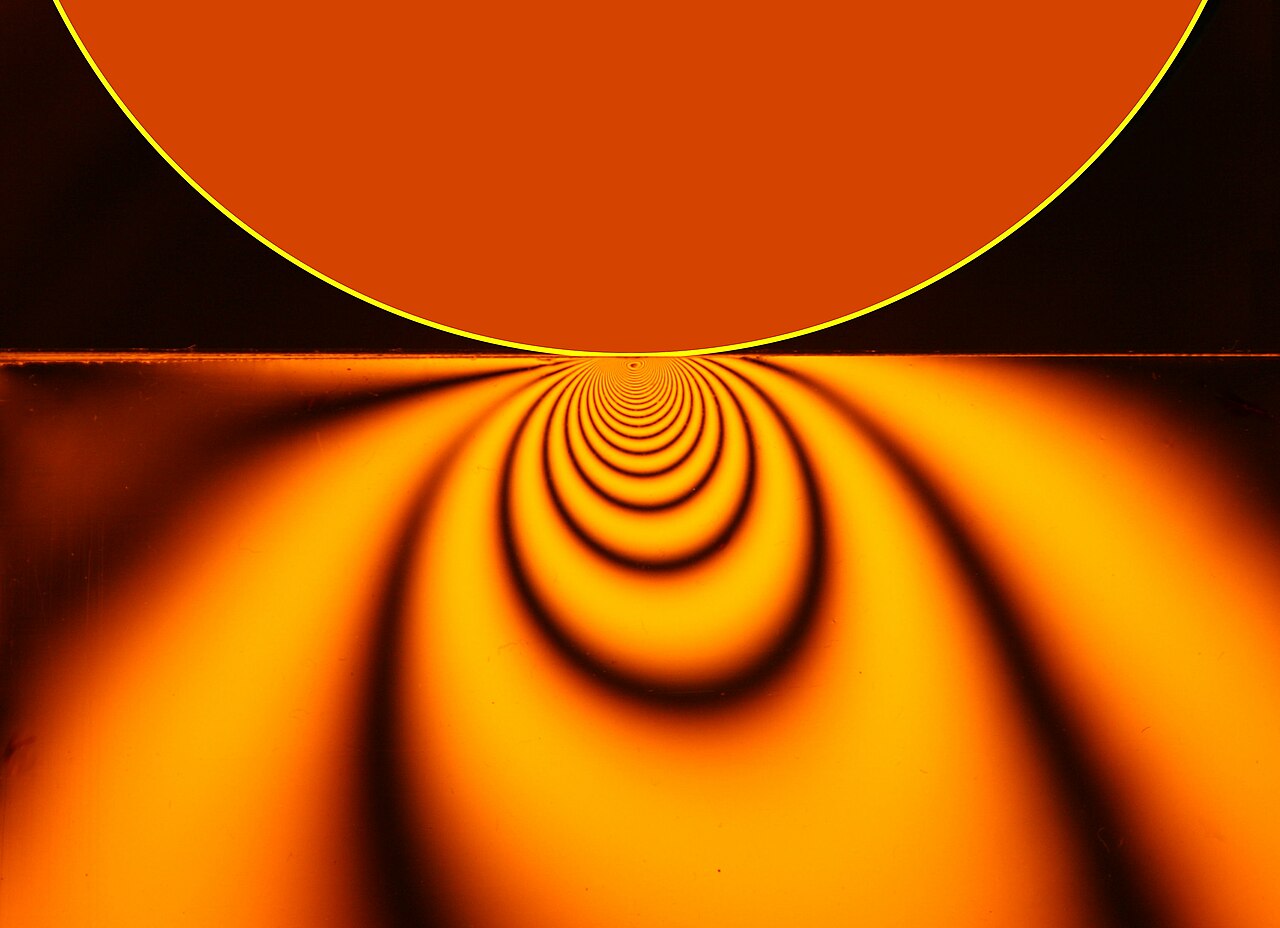
Исследование деформации твердых тел, соприкасающихся друг с другом.
Напряжения в зоне контакта действуют одновременно под действием нормальной и касательной силы. Напряжения стали видимыми с помощью фотоупругости .
Контактная механика – это изучение деформации твердых тел , соприкасающихся друг с другом в одной или нескольких точках. [1] [2] Основное различие в контактной механике заключается в напряжениях , действующих перпендикулярно поверхностям контактирующих тел (известных как нормальное напряжение ), и напряжениях трения , действующих по касательной между поверхностями ( напряжение сдвига ). Механика нормального контакта или механика контакта без трения фокусируется на нормальных напряжениях, вызванных приложенными нормальными силами и адгезией , присутствующей на поверхностях, находящихся в тесном контакте, даже если они чистые и сухие.Механика фрикционного контакта подчеркивает влияние сил трения.
Оригинальные работы по контактной механике относятся к 1881 году с публикацией статьи Генриха Герца «О контакте упругих тел» [3] («Ueber die Berührung fester elastischer Körper») . Герц пытался понять, как оптические свойства нескольких сложенных друг на друга линз могут меняться в зависимости от силы , удерживающей их вместе. Контактное напряжение Герца относится к локализованным напряжениям, которые возникают, когда две изогнутые поверхности соприкасаются и слегка деформируются под действием приложенных нагрузок. Эта величина деформации зависит от модуля упругости контактирующего материала. Он дает контактное напряжение как функцию нормальной контактной силы, радиусов кривизны обоих тел и модуля упругости обоих тел. Контактное напряжение Герца лежит в основе уравнений несущей способности и усталостной долговечности в подшипниках, зубчатых передачах и любых других телах, где две поверхности находятся в контакте.
История
Когда сфера прижимается к упругому материалу, площадь контакта увеличивается.
Классическая контактная механика прежде всего связана с Генрихом Герцем. [3] [4] В 1882 году Герц решил задачу о контакте двух упругих тел с искривленными поверхностями. Это до сих пор актуальное классическое решение обеспечивает основу для современных задач контактной механики. Например, в машиностроении и трибологии контактное напряжение Герца представляет собой описание напряжения внутри сопрягаемых деталей. Контактное напряжение Герца обычно относится к напряжению, близкому к области контакта между двумя сферами разных радиусов.
Лишь почти сто лет спустя Джонсон , Кендалл и Робертс нашли аналогичное решение для случая адгезионного контакта. [5] Эта теория была отвергнута Борисом Дерягиным и его сотрудниками [6] , которые предложили другую теорию адгезии [7] в 1970-х годах. Модель Дерягина стала известна как модель ДМТ (в честь Дерягина, Мюллера и Топорова) [7] , а модель Джонсона и др. Модель стала известна как модель JKR (в честь Джонсона, Кендалла и Робертса) для адгезионно-эластичного контакта. Этот отказ сыграл важную роль в разработке параметров Табора [8], а затем и Могиса [6] [9] , которые количественно определяют, какая модель контакта (из моделей JKR и DMT) лучше представляет адгезионный контакт для конкретных материалов.
Дальнейший прогресс в области контактной механики в середине двадцатого века можно отнести к таким именам, как Боуден и Табор . Боуден и Тейбор были первыми, кто подчеркнул важность шероховатости поверхности контактирующих тел. [10] [11] В результате исследования шероховатости поверхности выяснилось, что истинная площадь контакта между партнерами трения меньше, чем кажущаяся площадь контакта. Такое понимание коренным образом изменило и направление работ в трибологии. Работы Боудена и Табора породили несколько теорий контактной механики шероховатых поверхностей.
Вклад Арчарда (1957) [12] также следует упомянуть при обсуждении новаторских работ в этой области. Арчард пришел к выводу, что даже для шероховатых упругих поверхностей площадь контакта примерно пропорциональна нормальной силе . Дальнейшие важные идеи в этом направлении были предоставлены Гринвудом и Уильямсоном (1966), [13] Бушем (1975), [14] и Перссоном (2002). [15] Основные выводы этих работ заключались в том, что истинная поверхность контакта в шероховатых материалах обычно пропорциональна нормальной силе, в то время как параметры отдельных микроконтактов (т. е. давление, размер микроконтакта) зависят лишь слабо. по нагрузке.
Классические решения для неклейкого эластичного контакта
Теорию контакта между упругими телами можно использовать для определения площадей контакта и глубины отпечатков для простых геометрических форм. Ниже перечислены некоторые часто используемые решения. Теория, используемая для вычисления этих решений, обсуждается далее в статье. Решения для множества других технически важных форм, например, усеченного конуса, изношенной сферы, шероховатых профилей, полых цилиндров и т. д. можно найти в [16].
Контакт сферы с полупространством
Контакт упругой сферы с упругим полупространством
Упругая сфера радиуса вдавливает упругое полупространство , где общая деформация равна , образуя область контакта радиусом
Приложенная сила связана со смещением соотношением [4]
Распределение нормального давления в зоне контакта в зависимости от расстояния от центра круга равно [1]
где максимальное контактное давление, определяемое формулой
Радиус круга связан с приложенной нагрузкой уравнением
Суммарная деформация связана с максимальным контактным давлением соотношением
Максимальное касательное напряжение возникает внутри при .
Контакт между двумя сферами
Контакт между двумя сферами.Контакт двух скрещенных цилиндров одинакового радиуса.
Для контакта между двумя сферами радиусов и областью контакта является круг радиуса . Уравнения те же, что и для сферы, контактирующей с полуплоскостью, за исключением того, что эффективный радиус определяется как [4]
Контакт между двумя скрещенными цилиндрами одинакового радиуса
Это эквивалентно контакту между сферой радиуса и плоскостью .
Контакт жесткого цилиндра с плоским торцом с упругим полупространством.
Контакт жесткого цилиндрического индентора с упругим полупространством.
Если жесткий цилиндр вдавить в упругое полупространство, то создается распределение давления, описываемое [17]
где радиус цилиндра и
Связь между глубиной вдавливания и нормальной силой определяется выражением
Контакт жесткого конического индентора с упругим полупространством
Контакт жесткого конического индентора с упругим полупространством.
В случае индентирования упругого полупространства модуля Юнга жестким коническим индентором глубина области контакта и радиус контакта связаны соотношением [17]
где определяется как угол между плоскостью и боковой поверхностью конуса. Общая глубина вдавливания определяется выражением:
Контакт между двумя цилиндрами с параллельными осями
Контакт между двумя цилиндрами с параллельными осями
При контакте двух цилиндров с параллельными осями сила линейно пропорциональна длине цилиндров L и глубине вдавливания d : [18]
Радиусы кривизны в этом соотношении полностью отсутствуют. Радиус контакта описывается обычным соотношением
с
как в контакте между двумя сферами. Максимальное давление равно
Контакт подшипника
Контакт в случае подшипников часто представляет собой контакт между выпуклой поверхностью (охватывающий цилиндр или сфера) и вогнутой поверхностью (охватывающий цилиндр или сфера: отверстие или полусферическая чашка ).
Метод уменьшения размерности.
Контакт сферы с упругим полупространством и одномерная замененная модель.
Некоторые контактные проблемы можно решить с помощью метода уменьшения размерности (МДР). В этом методе исходная трехмерная система заменяется контактом тела с линейно-упругим или вязкоупругим основанием (см. рис.). Свойства одномерных систем в точности совпадают со свойствами исходной трехмерной системы, если видоизменить форму тел и определить элементы основания по правилам МДР. [19] [20] MDR основана на решении осесимметричных контактных задач, впервые полученных Людвигом Фёпплем (1941) и Герхардом Шубертом (1942) [21]
Однако для получения точных аналитических результатов необходимо, чтобы контактная задача была осесимметричной и контакты были компактными.
Теория Герца неадгезионного упругого контакта
Классическая теория контакта фокусировалась главным образом на неадгезивном контакте, при котором в зоне контакта не допускается возникновение силы натяжения, т. е. контактирующие тела могут быть разделены без сил сцепления. Для решения контактных задач, удовлетворяющих условию отсутствия адгезии, использовалось несколько аналитических и численных подходов. Между телами в местах их соприкосновения передаются сложные силы и моменты , поэтому задачи контактной механики могут стать весьма сложными. Кроме того, контактные напряжения обычно являются нелинейной функцией деформации. Для упрощения процедуры решения обычно определяют систему отсчета , в которой объекты (возможно, движущиеся относительно друг друга) статичны. Они взаимодействуют посредством поверхностного натяжения (или давления/напряжения) на границе раздела.
В качестве примера рассмотрим два объекта, которые встречаются на некоторой поверхности в плоскости ( , ), при этом ось - считается нормальной к поверхности. Одно из тел будет испытывать нормально направленное распределение давления и распределение тяги в плоскости поверхности и по всей области . С точки зрения баланса сил Ньютона , силы:
должны быть равны и противоположны силам, установленным в другом теле. Моменты, соответствующие этим силам:
также необходимо соединить тела так, чтобы они были кинематически неподвижны.
Предположения теории Герца
При определении решений контактных задач Герца принимаются следующие предположения :
Деформации малы и находятся в пределах упругости.
Поверхности непрерывны и несогласны (подразумевается, что площадь контакта намного меньше характерных размеров контактирующих тел).
Каждое тело можно рассматривать как упругое полупространство.
Поверхности не подвержены трению.
Дополнительные сложности возникают, когда некоторые или все эти предположения нарушаются, и такие контактные задачи обычно называют негерцевыми .
Методы аналитического решения
Контакт между двумя сферами.
Аналитические методы решения задачи неклейкого контакта можно разделить на два типа в зависимости от геометрии области контакта. [22] Соответствующий контакт – это контакт, при котором два тела соприкасаются в нескольких точках до того, как произойдет какая-либо деформация (т. е. они просто «прилегают друг к другу»). Несоответствующий контакт — это контакт, при котором формы тел настолько различаются, что при нулевой нагрузке они соприкасаются только в одной точке (или, возможно, вдоль линии). В несоответствующем случае площадь контакта мала по сравнению с размерами объектов и напряжения сильно концентрируются в этой области. Такой контакт называется концентрированным , иначе его называют диверсифицированным .
Распространенный подход в области линейной упругости заключается в наложении ряда решений, каждое из которых соответствует точечной нагрузке, действующей на область контакта. Например, в случае нагружения полуплоскости решение Фламанта часто используется в качестве отправной точки, а затем обобщается на различные формы области контакта. Балансы сил и моментов между двумя контактирующими телами действуют как дополнительные ограничения для решения.
Точечный контакт на (2D) полуплоскости
Схема нагружения плоскости силой P в точке (0, 0).
Отправной точкой для решения контактных задач является понимание эффекта «точечной нагрузки», приложенной к изотропной, однородной и линейно упругой полуплоскости, показанной на рисунке справа. Проблема может заключаться либо в плоском напряжении , либо в плоской деформации . Это краевая задача линейной упругости с учетом тяговых граничных условий :
где – дельта-функция Дирака . Граничные условия гласят, что на поверхности нет касательных напряжений и в точке (0, 0) приложена сингулярная нормальная сила P. Применение этих условий к основным уравнениям упругости дает результат
в некоторой точке , в полуплоскости. Круг, показанный на рисунке, указывает на поверхность, на которой максимальное напряжение сдвига является постоянным. По этому полю напряжений можно определить компоненты деформации и, таким образом, смещения всех материальных точек.
Линейный контакт на (2D) полуплоскости
Нормальная загрузка по региону
Предположим, что вместо точечной нагрузки к поверхности приложена распределенная нагрузка в диапазоне . Принцип линейной суперпозиции можно применить для определения результирующего поля напряжений как решения интегральных уравнений:
Сдвиговая нагрузка по региону
Тот же принцип применим и к нагрузке на поверхность в плоскости поверхности. Подобные тяги обычно возникают в результате трения. Решение аналогично приведенному выше (как для единичных, так и для распределенных нагрузок ), но немного изменено:
Эти результаты сами по себе могут быть наложены на результаты, приведенные выше для нормальной нагрузки, чтобы иметь дело с более сложными нагрузками.
Точечный контакт в (3D) полупространстве
Аналогично решению Фламанта для двумерной полуплоскости фундаментальные решения известны и для линейно упругого трехмерного полупространства. Они были найдены Буссинеском для сосредоточенной нормальной нагрузки и Черрути для тангенциальной нагрузки. См. раздел об этом в разделе «Линейная эластичность» .
Методы численного решения
Нет необходимости проводить различия между соответствующим и несоответствующим контактом, когда для решения контактных задач используются схемы численного решения. Эти методы не полагаются на дальнейшие предположения в процессе решения, поскольку они основаны исключительно на общей формулировке основных уравнений. [23] [24] [25] [26] [27] Помимо стандартных уравнений, описывающих деформацию и движение тел, можно сформулировать еще два неравенства. Первый просто ограничивает движение и деформацию тел, полагая, что проникновение произойти не может. Следовательно, зазор между двумя телами может быть только положительным или нулевым.
где обозначает контакт. Второе допущение в контактной механике связано с тем, что в зоне контакта не допускается возникновение сил натяжения (соприкасающиеся тела могут подниматься вверх без сил сцепления). Это приводит к неравенству, которому должны подчиняться напряжения на контактной границе. Он разработан для нормального стресса .
В местах соприкосновения поверхностей зазор равен нулю, т.е. и там нормальное напряжение отлично от нуля, действительно, . В местах, где поверхности не соприкасаются, нормальное напряжение равно нулю; , при этом разрыв положителен; то есть, . Этот тип формулировки дополнительности может быть выражен в так называемой форме Куна – Такера , а именно.
Эти условия справедливы в общем виде. Математическая формулировка разрыва зависит от кинематики базовой теории твердого тела (например, линейного или нелинейного твердого тела в двух или трех измерениях, модели балки или оболочки ). Переформулировав нормальное напряжение через контактное давление, ; т.е. проблему Куна-Такера можно переформулировать в стандартной форме дополнительности, т.е.
[1]
После дискретизации задача механики линейного упругого контакта может быть сформулирована в стандартной форме линейной задачи дополнительности (LCP). [28]
где – матрица, элементами которой являются так называемые коэффициенты влияния, связывающие контактное давление и деформацию. Строгая формулировка LCP проблемы CM, представленная выше, позволяет напрямую применять хорошо зарекомендовавшие себя методы численного решения, такие как алгоритм поворота Лемке . Преимущество алгоритма Лемке заключается в том, что он находит численно точное решение за конечное число итераций. Реализация MATLAB, представленная Almqvist et al. Это один из примеров, который можно использовать для численного решения проблемы. Кроме того, пример кода для решения LCP двумерной задачи механики линейного упругого контакта также был опубликован на обмене файлами MATLAB Альмквистом и др.
Контакт между шероховатыми поверхностями
Когда два тела с шероховатыми поверхностями прижимаются друг к другу, истинная площадь контакта, образующаяся между двумя телами, намного меньше, чем кажущаяся или номинальная площадь контакта . Механика контакта шероховатых поверхностей обсуждается с точки зрения механики нормального контакта и статического фрикционного взаимодействия. [29] Естественные и инженерные поверхности обычно демонстрируют особенности шероховатости, известные как неровности, в широком диапазоне масштабов длины вплоть до молекулярного уровня, при этом поверхностные структуры демонстрируют самородство, также известное как поверхностная фрактальность . Признано, что самоаффинная структура поверхностей является причиной линейного масштабирования истинной площади контакта с приложенным давлением. [30] [31] Если предположить, что в модели сдвиговых сварных контактов при трибологических взаимодействиях эта повсеместно наблюдаемая линейность между площадью контакта и давлением также может рассматриваться как источник линейности взаимосвязи между статическим трением и приложенной нормальной силой. [29]
При контакте между «случайной шероховатой» поверхностью и упругим полупространством истинная площадь контакта связана с нормальной силой соотношением [1] [31] [32] [33]
с равным среднеквадратичному (также известному как среднее квадратичное) наклона поверхности и . Среднее давление на истинной контактной поверхности
может быть разумно оценен как половина эффективного модуля упругости, умноженная на среднеквадратичный уклон поверхности .
Обзор модели GW
Гринвуд и Уильямсон в 1966 г. (GW) [31] предложили теорию упруго-контактной механики шероховатых поверхностей, которая сегодня является основой многих теорий в трибологии (трения, адгезии, тепло- и электропроводности, износа и др.). Они рассматривали контакт между гладкой жесткой плоскостью и номинально плоской деформируемой шероховатой поверхностью, покрытой закругленными выступами того же радиуса R. Их теория предполагает, что деформация каждой неровности не зависит от деформации ее соседей и описывается моделью Герца. . Высоты неровностей имеют случайное распределение. Вероятность того, что высота неровности находится между и равна . Авторы рассчитали количество пятен контакта n, общую площадь контакта и общую нагрузку P в общем случае. Они дали эти формулы в двух формах: в базовой и с использованием стандартизированных переменных. Если предположить, что N неровностей покрывают шероховатую поверхность, то ожидаемое количество контактов составит
Ожидаемую общую площадь контакта можно рассчитать по формуле
а ожидаемая общая сила определяется выражением
где:
R — радиус кривизны микронеровности,
z — высота микронеровности, отсчитываемая от линии профиля,
d, закрыть поверхность,
, составной модуль упругости Юнга,
, модуль упругости поверхности,
, коэффициенты поверхности Пуассона.
Гринвуд и Уильямсон ввели стандартизированное разделение и стандартизированное распределение по высоте , стандартное отклонение которого равно единице. Ниже представлены формулы в стандартизированном виде.
где:
d — разделение,
номинальная площадь контакта,
– поверхностная плотность неровностей,
– эффективный модуль Юнга.
и может быть определена при расчете членов для заданных поверхностей с использованием свертки шероховатости поверхности . [34] В нескольких исследованиях использовались предложенные аппроксимации кривой для предположения о гауссовском поверхностном высоком распределении с аппроксимацией кривой, представленной Arcoumanis et al. [35] и Единак [36] среди других. Неоднократно наблюдалось, что инженерные поверхности не демонстрируют гауссово распределение высоты поверхности, например, Пекленика. [37] Лейтон и др. [38] представили посадки для заштрихованных поверхностей гильз цилиндров двигателя внутреннего сгорания вместе с процессом определения условий для любых измеренных поверхностей. Лейтон и др. [38] продемонстрировали, что данные по Гауссу не являются точными для моделирования любых инженерных поверхностей, а затем продемонстрировали [39] , что раннее использование поверхностей приводит к постепенному переходу, который значительно меняет топографию поверхности, несущую способность и трение.
Недавно точные приближения к и были опубликованы Единаком. [36] Они задаются следующими рациональными формулами, которые являются аппроксимациями интегралов . Они рассчитываются для гауссова распределения неровностей, которое, как было показано, нереально для инженерной поверхности, но может быть принято в тех случаях, когда результаты трения, несущей способности или реальной площади контакта не имеют решающего значения для анализа. [38]
Поскольку коэффициенты
Максимальная относительная погрешность составляет .
Поскольку коэффициенты
Максимальная относительная погрешность составляет . В работе [36] также приведены точные выражения для
где erfc(z) означает дополнительную функцию ошибок, а – модифицированную функцию Бесселя второго рода.
Для ситуации, когда неровности на двух поверхностях имеют распределение по высоте по Гауссу и пики можно считать сферическими, [31] среднее контактное давление достаточно, чтобы вызвать текучесть, когда где - одноосный предел текучести и - твердость при вдавливании. [1] Гринвуд и Уильямсон [31] определили безразмерный параметр , называемый индексом пластичности , который можно использовать для определения того, будет ли контакт упругим или пластичным.
Модель Гринвуда-Вильямсона требует знания двух статистически зависимых величин; стандартное отклонение шероховатости поверхности и кривизны пиков неровностей. Альтернативное определение индекса пластичности было дано Микичем. [32] Предел текучести возникает, когда давление превышает одноосный предел текучести. Поскольку предел текучести пропорционален твердости при вдавливании , Микич определил показатель пластичности упругопластического контакта как
В этом определении представлена микрошероховатость в состоянии полной пластичности, и необходима только одна статистическая величина — среднеквадратичный наклон, который можно рассчитать на основе измерений поверхности. При поверхность при контакте ведет себя упруго.
В обеих моделях Гринвуда-Вильямсона и Микича предполагается, что нагрузка пропорциональна деформируемой площади. Следовательно, будет ли система вести себя пластично или упруго, не зависит от приложенной нормальной силы. [1]
Обзор модели GT
Модель, предложенная Гринвудом и Триппом (GT), [40] расширила модель GW для контакта между двумя шероховатыми поверхностями. Модель GT широко используется в области эластогидродинамического анализа.
Наиболее часто цитируемые уравнения модели GT относятся к площади контакта неровностей.
и нагрузка, переносимая неровностями
где:
, параметр шероховатости,
, номинальная площадь контакта,
, параметр масляной пленки Штрибека, впервые определенный Стрибеком \cite{gt} как ,
, эффективный модуль упругости,
, статистические функции, введенные для соответствия предполагаемому гауссовскому распределению неровностей.
Лейтон и др. [38] представили посадки для заштрихованных поверхностей гильз цилиндров двигателя внутреннего сгорания вместе с процессом определения условий для любых измеренных поверхностей. Лейтон и др. [38] продемонстрировали, что данные по Гауссу не являются точными для моделирования любых инженерных поверхностей, а затем продемонстрировали [39] , что раннее использование поверхностей приводит к постепенному переходу, который значительно меняет топографию поверхности, несущую способность и трение.
Точные решения для и впервые представлены Джединаком. [36] Они выражаются в следующем. Они рассчитываются для гауссова распределения неровностей, которое, как было показано, нереально для инженерной поверхности, но может быть принято в тех случаях, когда результаты трения, несущей способности или реальной площади контакта не имеют решающего значения для анализа. [38]
где erfc(z) означает дополнительную функцию ошибок, а – модифицированную функцию Бесселя второго рода.
В статье [36] можно найти подробный обзор существующих аппроксимаций . Новые предложения дают наиболее точные аппроксимации и , о которых сообщается в литературе. Они задаются следующими рациональными формулами, которые являются очень точными аппроксимациями интегралов . Они рассчитаны для гауссова распределения неровностей
Поскольку коэффициенты
Максимальная относительная погрешность составляет .
Поскольку коэффициенты
Максимальная относительная погрешность составляет .
Клеевой контакт между упругими телами
Когда две твердые поверхности находятся в непосредственной близости, на них действуют силы притяжения Ван-дер-Ваальса . Модель Ван-дер-Ваальса Брэдли [41] позволяет рассчитать силу растяжения между двумя твердыми сферами с идеально гладкими поверхностями. Модель контакта Герца не считает возможной адгезию. Однако в конце 1960-х годов при сравнении теории Герца с экспериментами по контакту между резиновыми и стеклянными сферами было обнаружено несколько противоречий.
Было замечено [5] , что, хотя теория Герца применима при больших нагрузках, при малых нагрузках
площадь контакта была больше, чем предсказывала теория Герца,
площадь контакта имела ненулевое значение даже при снятой нагрузке, и
сильная адгезия наблюдалась даже в том случае, если контактирующие поверхности были чистыми и сухими.
Это указывало на то, что действуют силы сцепления. Модель Джонсона-Кендалла-Робертса (JKR) и модели Дерягина-Мюллера-Топорова (DMT) были первыми, кто включил адгезию в контакт Герца.
Модель жесткого контакта Брэдли
Обычно предполагается, что поверхностная сила между двумя атомными плоскостями, находящимися на расстоянии друг от друга, может быть получена из потенциала Леннарда-Джонса . С этим предположением
где – сила (положительная при сжатии), – общая поверхностная энергия обеих поверхностей на единицу площади, – равновесное расстояние между двумя атомными плоскостями.
Модель Брэдли применила потенциал Леннарда-Джонса, чтобы найти силу сцепления между двумя твердыми сферами. Суммарная сила между сферами равна
где радиусы двух сфер.
Две сферы полностью разделяются, когда достигается сила отрыва, и в этот момент
Модель упругого контакта Джонсона-Кендалла-Робертса (JKR)
Схема контактной площадки модели JKR.JKR-тест с жестким валиком на деформируемом плоском материале: полный цикл
Чтобы включить эффект адгезии в контакт Герца, Джонсон, Кендалл и Робертс [5] сформулировали теорию адгезионного контакта JKR, используя баланс между запасенной упругой энергией и потерей поверхностной энергии . Модель JKR учитывает влияние контактного давления и адгезии только внутри области контакта. Общее решение для распределения давления в зоне контакта в модели JKR имеет вид
Обратите внимание, что в исходной теории Герца термином «содержание» пренебрегали на том основании, что напряжение не может поддерживаться в зоне контакта. Для контакта между двумя сферами
где - радиус области контакта, - приложенная сила, - общая поверхностная энергия обеих поверхностей на единицу площади контакта, - радиусы, модули Юнга и коэффициенты Пуассона двух сфер, и
Расстояние сближения между двумя сферами определяется выражением
Уравнение Герца для площади контакта двух сфер, модифицированное с учетом поверхностной энергии, имеет вид
Когда поверхностная энергия равна нулю, уравнение Герца для контакта между двумя сферами восстанавливается. Когда приложенная нагрузка равна нулю, радиус контакта равен
Растягивающая нагрузка, при которой сферы разделяются (т. е. ), по прогнозам, будет равна
Эту силу еще называют силой отрыва . Обратите внимание, что эта сила не зависит от модулей двух сфер. Однако существует и другое возможное решение для значения при этой нагрузке. Это критическая область контакта , определяемая формулой
Если определить работу адгезии как
где – энергии сцепления двух поверхностей и – член взаимодействия, мы можем записать радиус контакта JKR как
Растягивающая нагрузка при отрыве равна
а критический радиус контакта определяется выражением
Критическая глубина проникновения равна
Модель упругого контакта Дерягина-Мюллера-Топорова (ДМТ)
Модель Дерягина-Мюллера-Топорова (ДМТ) [7] [42] является альтернативной моделью адгезионного контакта, которая предполагает, что профиль контакта остается таким же, как и при контакте Герца, но с дополнительными притягивающими взаимодействиями за пределами области контакта.
Радиус контакта между двумя сферами из теории ДМТ равен
и сила отрыва
При достижении силы отрыва площадь контакта становится равной нулю и сингулярность контактных напряжений на краю площадки контакта отсутствует.
По работе адгезии
и
Параметр Табора
В 1977 году Тейбор [43] показал, что кажущееся противоречие между теориями JKR и DMT можно разрешить, заметив, что эти две теории представляют собой крайние пределы одной теории, параметризованной параметром Табора ( ), определяемым как
где равновесное расстояние между двумя контактирующими поверхностями. Теория JKR применима к большим, податливым сферам, для которых размер велик. Теория ДМТ применима к маленьким жестким сферам с небольшими значениями .
Впоследствии Дерягин и его сотрудники [44] , применив закон поверхностных сил Брэдли к упругому полупространству, подтвердили, что с увеличением параметра Табора сила отрыва падает от значения Брэдли до значения JKR . Более подробные расчеты были позже проведены Гринвудом [45] и выявили S-образную кривую нагрузки/подхода, которая объясняет эффект прыжка. Более эффективный метод проведения расчетов и дополнительные результаты были предложены Фэном [46]
Модель упругого контакта Можиса-Дагдейла
Схема области контакта для модели Можиса-Дагдейла.
Дальнейшее развитие идеи Табора было предложено Могисом [9] , который представил поверхностную силу в терминах аппроксимации зоны сцепления Дагдейла, так что работа адгезии определяется выражением
где — максимальная сила, предсказанная потенциалом Леннарда-Джонса, и — максимальное расстояние, полученное путем сопоставления площадей под кривыми Дагдейла и Леннарда-Джонса (см. соседний рисунок). Это означает, что сила притяжения постоянна для . Дальнейшего проникновения при сжатии нет. Идеальный контакт происходит в области радиуса , а силы сцепления величиной распространяются на область радиуса . В области две поверхности разделены расстоянием с и . Соотношение определяется как
.
В теории Могиса-Дагдейла [47] распределение поверхностного сцепления разделено на две части - одна из-за контактного давления Герца, а другая - из-за адгезионного напряжения Дагдейла. В регионе предполагается контакт Герца . Вклад в поверхностное сцепление давления Герца определяется выражением
где контактная сила Герца определяется выражением
Проникновение за счет упругого сжатия
Вертикальное смещение при
и расстояние между двумя поверхностями при равно
Распределение поверхностного сцепления из-за адгезионного напряжения Дагдейла равно
Тогда общая сила сцепления определяется выражением
Сжатие, обусловленное адгезией Дагдейла, равно
и разрыв в
Тогда чистая тяга на площади контакта будет равна, а чистая сила контакта равна . Когда адгезионная тяга падает до нуля.
На этом этапе вводятся безразмерные значения , которые обозначаются как
Кроме того, Могис предложил параметр , эквивалентный параметру Табора . Этот параметр определяется как
где ступенчатое когезионное напряжение равно теоретическому напряжению потенциала Леннарда-Джонса
Чжэн и Ю [48] предложили другое значение ступенчатого напряжения сцепления.
соответствовать потенциалу Леннарда-Джонса, что приводит к
Тогда результирующую контактную силу можно выразить как
и упругое сжатие как
Уравнение когезионного зазора между двумя телами принимает вид
Это уравнение можно решить, чтобы получить значения для различных значений и . При больших значениях получена модель JKR. Для малых значений извлекается модель ДМТ.
Модель Карпика-Оглтри-Салмерона (COS)
Модель Можиса-Дагдейла может быть решена итеративно только в том случае, если значение неизвестно априори. Приближенное решение Карпика-Оглтри-Салмерона [49] упрощает процесс, используя следующее соотношение для определения радиуса контакта :
где – площадь контакта при нулевой нагрузке, – переходный параметр, связанный с соотношением
Этот случай точно соответствует теории JKR и соответствует теории DMT. Для промежуточных случаев модель COS близко соответствует решению Можиса-Дугдейла для .
Влияние формы контакта
Даже при наличии идеально гладких поверхностей может проявиться геометрия в виде макроскопической формы контактирующей области. При осторожном отрывании жесткого пуансона с плоской, но необычной формы поверхностью от мягкого аналога его отрыв происходит не мгновенно, а фронты отрыва начинаются от заостренных углов и продвигаются внутрь, пока не будет достигнута конечная конфигурация, которая для макроскопически изотропных форм почти круглая. Основным параметром, определяющим адгезионную прочность плоских контактов, является максимальный линейный размер контакта. [50] Процесс отделения можно наблюдать экспериментально, можно увидеть в фильме. [51]
Смотрите также
Клей – неметаллический материал, используемый для склеивания различных материалов.
Клеевое соединение - техника соединения, используемая при производстве и ремонте.
Поверхностное натяжение - тенденция поверхности жидкости сжиматься с целью уменьшения площади поверхности.
Трибология - наука и техника взаимодействующих поверхностей в относительном движении.
Односторонний контакт - механическое ограничение, предотвращающее проникновение между двумя телами.
Смачивание – способность жидкости сохранять контакт с твердой поверхностью.
Рекомендации
См. Также: Контактная механика для мягкого полуэллиптического кончика пальца.
^ abcdef Джонсон, КЛ (1985). Свяжитесь с Механиком . Издательство Кембриджского университета. ISBN 978-0-521-25576-9.
^ Попов, ВЛ (2010). Контактная механика и трение: физические принципы и приложения . Шпрингер Берлин Гейдельберг. п. 362. ИСБН978-3-642-10803-7.
^ ab H. Hertz, 1881, Über die berührung fester elastischer Körper, Journal für die reine und angewandte Mathematik 92, стр. 156-171. (Английскую версию см.: Hertz, H., 1896. О контакте упругих твердых тел, В: Miscellaneous Papers, Chapter V, стр. 146–162 . Герц, Х. и Ленард П., перевод Джонса, DE. и Шотт Г.А., Лондон: Macmillan.
^ abc Hertz, HR, 1882, Über die Berührung fester elastischer Körper und Über die Härte, Verhandlungen des Vereins zur Beförderung des Gewerbefleisscs , Берлин: Verein zur Beförderung des Gewerbefleisses, стр. 449–463 (английскую версию см.: Hertz, H ., 1896. О контакте твердых упругих тел и о твердости, В: Разные статьи, Глава VI, стр. 163–183 , Герц Х. и Ленард П., перевод Джонса Д.Э. и Шотта Г.А., Лондон: Макмиллан.
^ abc Джонсон, КЛ; Кендалл, К.; Робертс, AD (8 сентября 1971 г.). «Поверхностная энергия и контакт упругих тел». Труды Лондонского королевского общества. А. Математические и физические науки . Королевское общество. 324 (1558): 301–313. Бибкод : 1971RSPSA.324..301J. дои : 10.1098/rspa.1971.0141 . ISSN 0080-4630. S2CID 137730057.
^ Аб Могис, Д. (3 февраля 2000 г.). Контакт, адгезия и разрыв упругих твердых тел . Springer Science & Business Media. ISBN3-540-66113-1.
^ abc Дерягин, Б.В.; Мюллер, В.М.; Топоров, Ю.П (1975). «Влияние контактных деформаций на слипание частиц». Журнал коллоидной и интерфейсной науки . Эльзевир Б.В. 53 (2): 314–326. Бибкод : 1975JCIS...53..314D. дои : 10.1016/0021-9797(75)90018-1. ISSN 0021-9797.
^ Табор, Д. (1 января 1970 г.). «Твердость твердых тел». Обзоры физики в технике . Издательство ИОП. 1 (3): 145–179. дои : 10.1088/0034-6683/1/3/i01. ISSN 0034-6683.
^ Аб Могис, Дэниел (1992). «Адгезия сфер: переход JKR-DMT с использованием модели Дагдейла». Журнал коллоидной и интерфейсной науки . Эльзевир Б.В. 150 (1): 243–269. Бибкод : 1992JCIS..150..243M. дои : 10.1016/0021-9797(92)90285-т. ISSN 0021-9797.
^ «Область контакта неподвижных и движущихся поверхностей» . Труды Лондонского королевского общества. Серия А. Математические и физические науки . Королевское общество. 169 (938): 391–413. 07.02.1939. дои : 10.1098/rspa.1939.0005. ISSN 0080-4630.
^ Боуден, ФП; Табор, Д. (2001). Трение и смазка твердых тел. Международная серия монографий по физике. Том. 1. Кларендон Пресс. ISBN978-0-19-850777-2.
^ Арчард, Дж. Ф. (24 декабря 1957). «Упругая деформация и законы трения». Труды Лондонского королевского общества. Серия А. Математические и физические науки . Королевское общество. 243 (1233): 190–205. Бибкод : 1957RSPSA.243..190A. дои : 10.1098/rspa.1957.0214. ISSN 0080-4630. S2CID 138707812.
^ Гринвуд, Дж.А.; Уильямсон, JBP (6 декабря 1966 г.). «Контакт номинально плоских поверхностей». Труды Лондонского королевского общества. Серия А. Математические и физические науки . Королевское общество. 295 (1442): 300–319. Бибкод : 1966RSPSA.295..300G. дои : 10.1098/rspa.1966.0242. ISSN 0080-4630. S2CID 137430238.
^ Перссон, BNJ; Бучер, Ф.; Кьяйя, Б. (29 апреля 2002 г.). «Упругий контакт случайно шероховатых поверхностей: сравнение теории с численными результатами». Физический обзор B . Американское физическое общество (APS). 65 (18): 184106. Бибкод : 2002PhRvB..65r4106P. doi : 10.1103/physrevb.65.184106. ISSN 0163-1829.
^ аб Снеддон, Ян Н. (1965). «Связь между нагрузкой и проникновением в осесимметричной задаче Буссинеска для пуансона произвольного профиля». Международный журнал инженерных наук . Эльзевир Б.В. 3 (1): 47–57. дои : 10.1016/0020-7225(65)90019-4. ISSN 0020-7225.
^ Попов, Валентин Л. (10 марта 2010 г.). Контактная механика и трение . Springer Science & Business Media. ISBN978-3-642-10803-7.
^ Попов, Валентин Л. (2013). «Метод уменьшения размерности в механике контакта и трения: связь между микро- и макромасштабами». Трение . ООО «Спрингер Сайенс энд Бизнес Медиа». 1 (1): 41–62. дои : 10.1007/s40544-013-0005-3 . ISSN 2223-7690. S2CID 256405038.
^ Попов, Валентин Л.; Хесс, Маркус (01 октября 2013 г.). Methode der Dimensionsreduktion in Kontaktmechanik und Reibung (на немецком языке). Спрингер-Верлаг. ISBN978-3-642-32673-8.
^ Попова, Елена; Попов, Валентин Львович (2020). «Людвиг Фёппль и Герхард Шуберт: Неизвестные классики контактной механики». ZAMM — Журнал прикладной математики и механики / Zeitschrift für Angewandte Mathematik und Mechanik . 100 (9): e202000203. Бибкод : 2020ZaMM..100E0203P. дои : 10.1002/zamm.202000203 .
^ Шигли, Джозеф Эдвард; Мишке, Чарльз Р. (1989). «Ч. 2». Машиностроительное проектирование (5-е изд.). МакГроу-Хилл Наука, инженерия и математика. ISBN0-07-056899-5.
^ Калкер, Джей-Джей (1990). Трехмерные упругие тела в контакте качения. Механика твердого тела и ее приложения. Спрингер Нидерланды. ISBN978-0-7923-0712-9.
^ Лаурсен, Т.А. (2003). Вычислительная механика контакта и удара: основы моделирования межфазных явлений в нелинейном анализе методом конечных элементов. Инженерная онлайн-библиотека. Шпрингер Берлин Гейдельберг. ISBN978-3-540-42906-7.
^ Акари, В.; Брольято, Б. (2008). Численные методы исследования негладких динамических систем: приложения в механике и электронике. Конспект лекций по прикладной и вычислительной механике. Шпрингер Берлин Гейдельберг. ISBN978-3-540-75392-6.
^ Попов, Валентин Л. (2009). Kontaktmechanik und Reibung (на немецком языке). Springer Science & Business Media. ISBN978-3-540-88836-9.
^ Коттл, Р.; Панг, Дж.; Стоун, Р. (1 января 2009 г.). Проблема линейной дополнительности . Классика прикладной математики. Общество промышленной и прикладной математики. дои : 10.1137/1.9780898719000. ISBN9780898716863.
^ аб Ханаор, Д.; Ган, Ю.; Эйнав, И. (2016). «Статическое трение на фрактальных границах». Международная Трибология . 93 : 229–238. arXiv : 2106.01473 . doi :10.1016/j.triboint.2015.09.016. S2CID 51900923.
^ Чжай, Чонгпу; Ханаор, Дориан; Ган, Исян (2017). «Контактная жесткость многомасштабных поверхностей путем анализа усечения». Международный журнал механических наук . Эльзевир Б.В. 131–132: 305–316. doi : 10.1016/j.ijmecsci.2017.07.018. ISSN 0020-7403.
^ abcde Гринвуд, JA; Уильямсон, JBP (6 декабря 1966 г.). «Контакт номинально плоских поверхностей». Труды Лондонского королевского общества. Серия А. Математические и физические науки . Королевское общество. 295 (1442): 300–319. Бибкод : 1966RSPSA.295..300G. дои : 10.1098/rspa.1966.0242. ISSN 0080-4630. S2CID 137430238.
^ аб Микич, BB (1974). «Тепловая контактная проводимость; теоретические соображения». Международный журнал тепломассообмена . Эльзевир Б.В. 17 (2): 205–214. дои : 10.1016/0017-9310(74)90082-9. ISSN 0017-9310.
^ Хён, Сангил; Роббинс, Марк О. (2007). «Упругий контакт между шероховатыми поверхностями: влияние шероховатости на больших и малых длинах волн». Международная Трибология . Эльзевир Б.В. 40 (10–12): 1413–1422. doi :10.1016/j.triboint.2007.02.003. ISSN 0301-679X.
^ Лейтон; и другие. (2016). «Коэффициенты текучести для конкретной поверхности для прогнозирования трения заштрихованных поверхностей» (PDF) . Топография поверхности: метрология и свойства . 4 (2): 025002. Бибкод : 2016SuTMP...4b5002L. дои : 10.1088/2051-672x/4/2/025002 . S2CID 111631084.
^ Аркуманис, К.; Остовар, П.; Мортье, Р. (1 октября 1997 г.). «Моделирование смешанной смазки ньютоновских и разжижающихся при сдвиге жидкостей в конфигурации поршневого кольца». Серия технических документов SAE . Том. 1. Уоррендейл, Пенсильвания. дои : 10.4271/972924.
^ abcde Единак, Радослав (2019). «Точные и приближенные решения бесконечных интегралов распределения высоты неровностей для моделей контакта неровностей Гринвуда-Вильямсона и Гринвуда-Триппа». Международная Трибология . Эльзевир Б.В. 130 : 206–215. doi :10.1016/j.triboint.2018.09.009. ISSN 0301-679X. S2CID 139894096.
^ Пекленик, Дж. (сентябрь 1967 г.). «Документ 24: Новые разработки в области определения характеристик поверхности и измерений с помощью анализа случайных процессов» . Труды Института инженеров-механиков, Материалы конференции . 182 (11): 108–126. doi : 10.1243/pime_conf_1967_182_309_02. ISSN 0367-8849.
^ abcdef Лейтон, М.; Моррис, Н.; Рахмани, Р.; Ранежат, Х. (1 января 2017 г.). «Модель неровностей поверхности для прогнозирования трения в граничных и смешанных режимах смазки» (PDF) . Меканика . 52 (1): 21–33. doi : 10.1007/s11012-016-0397-z. ISSN 1572-9648. S2CID 54710212.
^ аб Лейтон, М; Моррис, Н.; Гор, М; Рахмани, Р; Ранежат, Х; Кинг, PD (5 августа 2016 г.). «Граничные взаимодействия шероховатых негауссовских поверхностей». Труды Института инженеров-механиков, Часть J: Журнал инженерной трибологии . 230 (11): 1359–1370. дои : 10.1177/1350650116656967 . ISSN 1350-6501. S2CID 53347629.
^ Гринвуд, Дж.А.; Трипп, Дж. Х. (1970). «Контакт двух номинально плоских шероховатых поверхностей». Труды Института инженеров-механиков . Публикации SAGE. 185 (1): 625–633. дои : 10.1243/pime_proc_1970_185_069_02. ISSN 0020-3483.
^ Брэдли, RS (1932). «LXXIX. Сила сцепления между твердыми поверхностями и поверхностная энергия твердых тел ». Лондонский, Эдинбургский и Дублинский философский журнал и научный журнал . Информа ЮК Лимитед. 13 (86): 853–862. дои : 10.1080/14786449209461990. ISSN 1941-5982.
^ Мюллер, В.М.; Дерягин, Б.В.; Топоров, Ю.П. (1983). «О двух методах расчета силы прилипания упругого шара к жесткой плоскости». Коллоиды и поверхности . Эльзевир Б.В. 7 (3): 251–259. дои : 10.1016/0166-6622(83)80051-1. ISSN 0166-6622.
^ ТАБОР, Д. (1977). «Поверхностные силы и поверхностные взаимодействия». Пленарные и приглашенные лекции . Эльзевир. п. 3–14. дои : 10.1016/b978-0-12-404501-9.50009-2. ISBN9780124045019.
^ Мюллер, В.М.; Ющенко, В.С.; Дерягин, Б.В. (1980). «О влиянии молекулярных сил на деформацию упругого шара и прилипание его к жесткой плоскости». Журнал коллоидной и интерфейсной науки . Эльзевир Б.В. 77 (1): 91–101. Бибкод : 1980JCIS...77...91M. дои : 10.1016/0021-9797(80)90419-1. ISSN 0021-9797.
^ Гринвуд, JA (1997-06-08). «Склеивание упругих сфер». Труды Лондонского королевского общества. Серия А: Математические, физические и технические науки . Королевское общество. 453 (1961): 1277–1297. Бибкод : 1997RSPSA.453.1277G. дои : 10.1098/rspa.1997.0070. ISSN 1364-5021. S2CID 124217562.
^ Фэн, Джеймс К. (2000). «Контактное поведение сферических упругих частиц: численное исследование адгезии и деформаций частиц». Коллоиды и поверхности А: Физико-химические и инженерные аспекты . Эльзевир Б.В. 172 (1–3): 175–198. дои : 10.1016/s0927-7757(00)00580-x. ISSN 0927-7757.
^ Джонсон, КЛ; Гринвуд, Дж. А. (1997). «Карта адгезии для контакта упругих сфер». Журнал коллоидной и интерфейсной науки . Эльзевир Б.В. 192 (2): 326–333. Бибкод : 1997JCIS..192..326J. doi :10.1006/jcis.1997.4984. ISSN 0021-9797. ПМИД 9367554.
^ Чжэн, Чжицзюнь; Ю, Цзилинь (2007). «Использование приближения Дагдейла для сопоставления конкретного взаимодействия при адгезионном контакте упругих объектов». Журнал коллоидной и интерфейсной науки . Эльзевир Б.В. 310 (1): 27–34. Бибкод : 2007JCIS..310...27Z. doi :10.1016/j.jcis.2007.01.042. ISSN 0021-9797. ПМИД 17335843.
^ Карпик, Роберт В.; Оглтри, Д. Фрэнк; Салмерон, Микель (1999). «Общее уравнение для определения площади контакта и измерения трения и нагрузки». Журнал коллоидной и интерфейсной науки . Эльзевир Б.В. 211 (2): 395–400. Бибкод : 1999JCIS..211..395C. doi :10.1006/jcis.1998.6027. ISSN 0021-9797. ПМИД 10049556.
^ Попов, Валентин Л.; Порт, Роман; Ли, Цян (01 сентября 2017 г.). «Прочность клеевых контактов: влияние геометрии контакта и градиентов материала». Трение . 5 (3): 308–325. дои : 10.1007/s40544-017-0177-3 . ISSN 2223-7690.
^ Физика трения (06 декабря 2017 г.). Наука трения: Адгезия сложных форм. Архивировано из оригинала 15 декабря 2021 г. Проверено 2 января 2018 г. - через YouTube.
Внешние ссылки
[1]: Дополнительную информацию о контактных напряжениях и эволюции уравнений напряжения в подшипниках можно найти в этой публикации Эрвина Зарецкого, руководителя отдела подшипников, зубчатых передач и трансмиссий НАСА, Исследовательского центра Гленна НАСА.
[2]: Программа MATLAB для решения задачи механики линейного упругого контакта под названием; «Решение LCP задачи механики линейного упругого контакта» предоставляется при обмене файлами в MATLAB Central.
[3]: Калькулятор контактной механики.
[4]: подробные расчеты и формулы теории ДКР для двух сфер.
[5]: Код Matlab для контактного анализа Герца (включает линейные, точечные и эллиптические случаи).
[6]: модели адгезии JKR, MD и DMT (программы Matlab).






















































![{\displaystyle M_{x}=\int _{S}y~q_{z}(x,y)~\mathrm {d} A~;~~M_{y}=\int _{S}-x~ q_{z}(x,y)~\mathrm {d} A~;~~M_{z}=\int _{S}[x~q_{y}(x,y)-y~q_{x} (x,y)]~\mathrm {d} A}](https://wikimedia.org/api/rest_v1/media/math/render/svg/84858a589cb089aa631e81fb379d152b42ab368b)







![{\displaystyle {\begin{aligned}\sigma _{xx}&=-{\frac {2z}{\pi }}\int _{a}^{b}{\frac {p\left(x'\ right)\left(xx'\right)^{2}\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}} ~;~~\sigma _{zz}=-{\frac {2z^{3}}{\pi }}\int _{a}^{b}{\frac {p\left(x'\right) \,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}\\[3pt]\sigma _{xz}&=- {\frac {2z^{2}}{\pi }}\int _{a}^{b}{\frac {p\left(x'\right)\left(xx'\right)\,dx' }{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/748f49fbb04908de77b05ca997ec1baefdc73491)


![{\displaystyle {\begin{aligned}\sigma _{xx}&=-{\frac {2}{\pi }}\int _{a}^{b}{\frac {q\left(x'\ right)\left(xx'\right)^{3}\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}} ~;~~\sigma _{zz}=-{\frac {2z^{2}}{\pi }}\int _{a}^{b}{\frac {q\left(x'\right) \left(xx'\right)\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}\\[3pt]\ сигма _{xz}&=-{\frac {2z}{\pi }}\int _{a}^{b}{\frac {q\left(x'\right)\left(xx'\right) ^{2}\,dx'}{\left[\left(xx'\right)^{2}+z^{2}\right]^{2}}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c3d99b5917ad56c9a691709199164f1bd9018c3f)












































![{\displaystyle {\begin{aligned}[][a_{0},a_{1},a_{2},a_{3}]&=[0.398942280401,0.159773702775,0.0389687688311,0.00364356495452]\\[][b_{ 1},b_{2},b_{3},b_{4},b_{5},b_{6}]&=\left[1.653807476138,1.170419428529,0.448892964428,0.0951971709160,0.00931642803836,-6.383 774657279\times 10^{ -6}\right]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/91be480fb30f0f102dd6f2af32e97c2f0ba7a8a7)


![{\displaystyle {\begin{aligned}[][a_{0},a_{1},a_{2},a_{3}]&=[0.430019993662,0.101979509447,0.0229040629580,0.000688602924]\\[][b_{ 1},b_{2},b_{3},b_{4},b_{5},b_{6}]&=[1.671117125984,1.199586555505,0.46936532151,0.102632881122,0.010686348714,0.00005172002 71]\end{выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3b60e034e36c4936d8cb548ca96d555a463be8ce)






















![{\displaystyle {\begin{aligned}[][a_{0},a_{1},a_{2},a_{3}]&=[0.5,0.182536384941,0.039812283118,0.003684879001]\\[][b_{ 1},b_{2},b_{3},b_{4},b_{5},b_{6}]&=[1.960841785003,1.708677456715,0.856592986083,0.264996791567,0.049257843893,0.0046407401 33]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f29ff10822d1d70c853baeacd29de26639ec0413)


![{\displaystyle {\begin{aligned}[][a_{0},a_{1},a_{2},a_{3}]&=[0.616634218997,0.108855827811,0.023453835635,0.000449332509]\\[][b_{ 1},b_{2},b_{3},b_{4},b_{5},b_{6}]&=[1.919948267476,1.635304362591,0.799392556572,0.240278859212,0.043178653945,0.0038633342 76]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3ba5350391adf41af8360811b035ddd8bfd6670a)

![{\displaystyle F(z)={\cfrac {16\gamma }{3z_{0}}}\left[\left({\cfrac {z}{z_{0}}}\right)^{-9} -\left({\cfrac {z}{z_{0}}}\right)^{-3}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6cc0d0f528d67748519b18d1879f1294c69ad04f)


![{\displaystyle F_{a}(z)={\cfrac {16\gamma \pi R}{3}}\left[{\cfrac {1}{4}}\left({\cfrac {z}{z_ {0}}}\right)^{-8}-\left({\cfrac {z}{z_{0}}}\right)^{-2}\right]~;~~{\frac {1 }{R}}={\frac {1}{R_{1}}}+{\frac {1}{R_{2}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8ed6e557a37cc80e1cabcee94c45c1ed372b1afd)






























![{\displaystyle \mu :={\frac {d_{c}}{z_{0}}}\approx \left[{\frac {R(\Delta \gamma)^{2}}{{E^{* }}^{2}z_{0}^{3}}}\right]^{\frac {1}{3}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cee629f48f3b4619f743181ab1f51a37a65b6663)

















![{\displaystyle u^{H}(c)={\cfrac {1}{\pi R}} \left[a^{2}\left(2-m^{2}\right)\sin ^{- 1}\left({\frac {1}{m}}\right)+a^{2}{\sqrt {m^{2}-1}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2fc8fcd224f3cc8f0b4c13688f18599f477857de)

![{\displaystyle p^{D}(r)={\begin{cases}-{\frac {\sigma _{0}}{\pi }}\cos ^{-1}\left[{\frac {2 -m^{2}-{\frac {r^{2}}{a^{2}}}}{m^{2}\left(1-{\frac {r^{2}}{m^ {2}a^{2}}}\right)}}\right]&\quad {\text{for}}\quad r\leq a\\-\sigma _{0}&\quad {\text{ for}}\quad a\leq r\leq c\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cd9f07dae34286f3e0a287add88884474ed78b83)
![{\displaystyle F^{D}=-2\sigma _{0}m^{2}a^{2}\left[\cos ^{-1}\left({\frac {1}{m}} \right)+{\frac {1}{m^{2}}}{\sqrt {m^{2}-1}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/627849d1b6250dce2090a9098d8227ad0f8e4d10)

![{\displaystyle h^{D}(c)=\left({\frac {4\sigma _{0}a}{\pi E^{*}}}\right)\left[{\sqrt {m^ {2}-1}}\cos ^{-1}\left({\frac {1}{m}}\right)+1-m\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0313721de708f08ab70365bbafeba470b275a5f5)









![{\displaystyle {\bar {F}}={\bar {a}}^{3}-\lambda {\bar {a}}^{2}\left[{\sqrt {m^{2}-1 }}+m^{2}\sec ^{-1}м\вправо]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8e81925aa29d61950849b8ff97628db1fe9e869e)

![{\displaystyle {\frac {\lambda {\bar {a}}^{2}}{2}}\left[\left(m^{2}-2\right)\sec ^{-1}m+{ \sqrt {m^{2}-1}}\right]+{\frac {4\lambda {\bar {a}}}{3}}\left[{\sqrt {m^{2}-1} }\sec ^{-1}м-м+1\вправо]=1}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5628cdc5b5275a8e83a3589da8db3b2fdc10869d)









