Механическое преимущество — это мера усиления силы , достигаемая с помощью инструмента, механического устройства или системы машины. Устройство компенсирует входные силы движением, чтобы получить желаемое усиление выходной силы. Моделью для этого является закон рычага . Компоненты машины, предназначенные для управления силами и движением таким образом, называются механизмами . [1] Идеальный механизм передает мощность, не добавляя и не вычитая из нее. Это означает, что идеальная машина не включает в себя источник энергии, не имеет трения и сконструирована из жестких тел , которые не прогибаются и не изнашиваются. Производительность реальной системы относительно этого идеала выражается в терминах коэффициентов эффективности, которые учитывают отклонения от идеала.
Рычаг — это подвижная планка, которая вращается на точке опоры, прикрепленной к неподвижной точке или расположенной на ней или через нее. Рычаг работает, прикладывая силы на разных расстояниях от точки опоры или шарнира. Расположение точки опоры определяет класс рычага . Когда рычаг вращается непрерывно, он функционирует как вращающийся рычаг 2-го класса. Движение конечной точки рычага описывает фиксированную орбиту, где может происходить обмен механической энергией. (см. пример кривошипной рукоятки.)
В наше время этот вид вращательного рычага широко используется; см. (вращающийся) рычаг 2-го рода; см. шестерни, шкивы или фрикционный привод, используемый в схеме механической передачи мощности. Обычно механическим преимуществом манипулируют в «свернутой» форме с помощью использования более чем одной шестерни (комплекта шестерен). В таком комплекте шестерен используются шестерни с меньшим радиусом и меньшим присущим механическим преимуществом. Чтобы использовать не свернутое механическое преимущество, необходимо использовать вращающийся рычаг «истинной длины». См. также включение механического преимущества в конструкцию определенных типов электродвигателей; одна из конструкций — «аутраннер».

Когда рычаг поворачивается на точке опоры, точки, более удаленные от этой точки опоры, движутся быстрее, чем точки, более близкие к точке опоры. Мощность, входящая и исходящая из рычага, одинакова, поэтому должна выходить одинаково при выполнении расчетов. Мощность является произведением силы и скорости, поэтому силы, приложенные к точкам, более удаленным от точки опоры, должны быть меньше, чем при приложении к точкам, более близким к ней. [1]
Если a и b — расстояния от точки опоры до точек A и B , и если сила F A, приложенная к точке A, является входной силой, а сила F B, приложенная к точке B, является выходной, то отношение скоростей точек A и B определяется как a / b, поэтому отношение выходной силы к входной силе, или механическое преимущество, определяется как
Это закон рычага , который Архимед сформулировал с помощью геометрических рассуждений. [2] Он показывает, что если расстояние a от точки опоры до места приложения входной силы (точка A ) больше, чем расстояние b от точки опоры до места приложения выходной силы (точка B ), то рычаг усиливает входную силу. Если расстояние от точки опоры до входной силы меньше, чем от точки опоры до выходной силы, то рычаг уменьшает входную силу. Архимеду, который осознал глубокие последствия и практичность закона рычага, приписывают знаменитое утверждение: «Дайте мне точку опоры, и с помощью рычага я переверну весь мир». [3]
Использование скорости в статическом анализе рычага является применением принципа виртуальной работы .
Требование, чтобы входная мощность идеального механизма была равна выходной мощности, обеспечивает простой способ вычисления механического выигрыша по соотношению входной и выходной скоростей системы.
Входная мощность зубчатой передачи с крутящим моментом T A , приложенным к ведущему шкиву, вращающемуся с угловой скоростью ω A , составляет P=T A ω A .
Поскольку поток мощности постоянен, крутящий момент T B и угловая скорость ω B выходной шестерни должны удовлетворять соотношению
что дает
Это показывает, что для идеального механизма отношение скорости входа-выхода равно механическому преимуществу системы. Это применимо ко всем механическим системам, начиная от роботов и заканчивая связями .
Зубья шестерен сконструированы таким образом, что число зубьев на шестерне пропорционально радиусу ее делительной окружности, и так, что делительные окружности зацепляющихся шестерен катятся друг по другу без проскальзывания. Передаточное отношение для пары зацепляющихся шестерен можно вычислить из отношения радиусов делительных окружностей и отношения числа зубьев на каждой шестерне, ее передаточного отношения .
Скорость v точки контакта на делительных окружностях одинакова на обоих зубчатых колесах и определяется по формуле
где входная шестерня A имеет радиус r A и входит в зацепление с выходной шестерней B радиусом r B , следовательно,
где N A — число зубьев на входной шестерне, а N B — число зубьев на выходной шестерне.
Механическое преимущество пары зацепляющихся шестерен, у которых входная шестерня имеет N A зубьев, а выходная шестерня — N B зубьев, определяется по формуле
Это показывает, что если выходная шестерня G B имеет больше зубьев, чем входная шестерня G A , то зубчатая передача усиливает входной крутящий момент. И если выходная шестерня имеет меньше зубьев, чем входная шестерня, то зубчатая передача уменьшает входной крутящий момент.
Если выходная шестерня зубчатой передачи вращается медленнее входной шестерни, то зубчатая передача называется редуктором скорости (умножителем силы). В этом случае, поскольку выходная шестерня должна иметь больше зубьев, чем входная шестерня, редуктор скорости будет усиливать входной крутящий момент.
Механизмы, состоящие из двух звездочек, соединенных цепью, или двух шкивов, соединенных ремнем, предназначены для обеспечения определенного механического преимущества в системах передачи мощности.
Скорость v цепи или ремня одинакова при контакте с двумя звездочками или шкивами:
где входная звездочка или шкив A зацепляется с цепью или ремнем по радиусу делительной окружности r A , а выходная звездочка или шкив B зацепляется с этой цепью или ремнем по радиусу делительной окружности r B ,
поэтому
где N A — число зубьев на входной звездочке, а N B — число зубьев на выходной звездочке. Для зубчато-ременной передачи можно использовать число зубьев на звездочке. Для фрикционно-ременных передач необходимо использовать радиус шага входного и выходного шкивов.
Механическое преимущество пары цепной передачи или зубчато-ременной передачи с входной звездочкой с N A зубьями и выходной звездочкой с N B зубьями определяется по формуле
Механическое преимущество для фрикционных ременных передач определяется следующим образом:
Цепи и ремни рассеивают мощность через трение, растяжение и износ, что означает, что выходная мощность фактически меньше входной мощности, что означает, что механическое преимущество реальной системы будет меньше, чем рассчитанное для идеального механизма. Цепной или ременной привод может терять до 5% мощности через систему из-за трения, нагрева, деформации и износа, в этом случае эффективность привода составляет 95%.
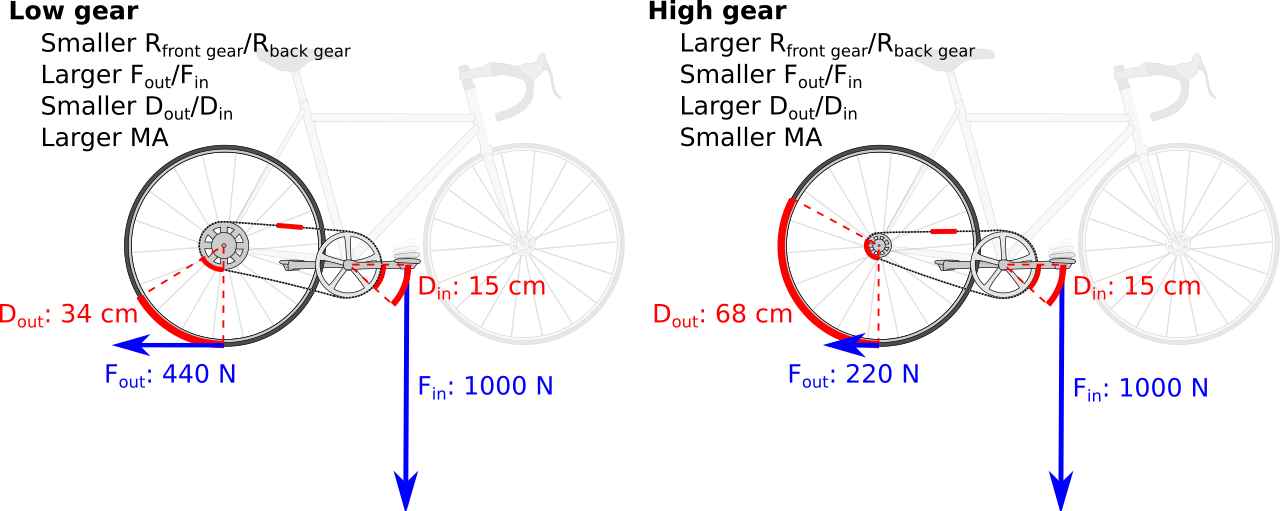
Рассмотрим 18-скоростной велосипед с 7-дюймовыми (радиусными) шатунами и 26-дюймовыми (диаметральными) колесами. Если звездочки на шатуне и на заднем ведущем колесе имеют одинаковый размер, то отношение выходной силы на шине к входной силе на педали можно рассчитать по закону рычага следующим образом:
Теперь предположим, что передние звездочки имеют выбор из 28 и 52 зубьев, а задние звездочки имеют выбор из 16 и 32 зубьев. Используя различные комбинации, мы можем вычислить следующие соотношения скоростей между передними и задними звездочками
Отношение силы, движущей велосипед, к силе на педали, которое является общим механическим преимуществом велосипеда, является произведением передаточного числа (или передаточного числа зубьев выходной звездочки/входной звездочки) и передаточного числа рычага кривошипа.
Обратите внимание, что в каждом случае сила, действующая на педали, больше силы, движущей велосипед вперед (на рисунке выше показана соответствующая направленная назад сила реакции на земле).
Блок и полиспаст — это сборка каната и шкивов, которая используется для подъема грузов. Несколько шкивов собираются вместе, чтобы сформировать блоки, один из которых фиксирован, а другой движется вместе с грузом. Канат продевается через шкивы, чтобы обеспечить механическое преимущество, которое усиливает силу, приложенную к канату. [4]
Чтобы определить механическое преимущество системы блоков и полиспастов, рассмотрим простой случай ружейного полиспаст, который имеет один установленный или фиксированный блок и один подвижный блок. Канат продевается вокруг фиксированного блока и падает вниз к подвижному блоку, где он продевается вокруг шкива и поднимается обратно, чтобы быть завязанным на фиксированном блоке.

Пусть S будет расстоянием от оси неподвижного блока до конца веревки, то есть A , где приложена входная сила. Пусть R будет расстоянием от оси неподвижного блока до оси подвижного блока, то есть B , где приложена нагрузка.
Общую длину веревки L можно записать как
где K — постоянная длина троса, проходящего через шкивы и не изменяющегося при движении блока и полиспаста.
Скорости V A и V B точек A и B связаны постоянной длиной веревки, то есть
или
Знак «минус» показывает, что скорость груза противоположна скорости приложенной силы, то есть, когда мы тянем веревку вниз, груз движется вверх.
Пусть V A положительно направлен вниз, а V B положительно направлен вверх, тогда это соотношение можно записать как отношение скоростей
где 2 — количество секций каната, поддерживающих подвижный блок.
Пусть F A будет входной силой, приложенной к концу веревки A , а F B будет силой в точке B на движущемся блоке. Подобно скоростям, F A направлена вниз, а F B направлена вверх.
В идеальной системе блоков и полиспастов отсутствует трение в блоках, а также прогиб или износ троса, что означает, что мощность, потребляемая приложенной силой F A V A, должна быть равна выходной мощности, действующей на нагрузку F B V B , то есть
Отношение выходной силы к входной силе представляет собой механическое преимущество идеальной системы такелажа ружья,
Этот анализ обобщается до идеального блока и полиспаста с подвижным блоком, поддерживаемым n секциями каната,
Это показывает, что сила, создаваемая идеальным блоком и полиспастом, в n раз превышает входную силу, где n — количество секций каната, поддерживающих движущийся блок.
Механическое преимущество, которое вычисляется с использованием предположения, что мощность не теряется из-за прогиба, трения и износа машины, является максимальной производительностью, которая может быть достигнута. По этой причине его часто называют идеальным механическим преимуществом (ИМП). В процессе эксплуатации прогиб, трение и износ уменьшают механическое преимущество. Величина этого уменьшения от идеального до фактического механического преимущества (АМП) определяется фактором, называемым эффективностью , величиной, которая определяется экспериментально.
В качестве примера можно привести блок и полиспаст с шестью канатными секциями иПри нагрузке 600 фунтов оператору идеальной системы потребовалось бы тянуть трос на шесть футов и прилагать усилия100 фунтов силы F для подъема груза на один фут. Оба соотношения F out / F in и V in / V out показывают, что IMA равен шести. Для первого соотношения,100 фунтов силы входного воздействия приводят к600 фунтов силы на выходе. В реальной системе сила на выходе будет меньше 600 фунтов из-за трения в шкивах. Второе отношение также дает MA 6 в идеальном случае, но меньшее значение в практическом сценарии; оно не учитывает должным образом потери энергии, такие как растяжение веревки. Вычитание этих потерь из IMA или использование первого отношения дает AMA.
Идеальное механическое преимущество (IMA), или теоретическое механическое преимущество , — это механическое преимущество устройства при условии, что его компоненты не изгибаются, нет трения и нет износа. Оно рассчитывается с использованием физических размеров устройства и определяет максимальную производительность, которую может достичь устройство.
Предположения идеальной машины эквивалентны требованию, что машина не хранит и не рассеивает энергию; мощность в машине, таким образом, равна мощности на выходе. Таким образом, мощность P постоянна через машину, а сила, умноженная на скорость на входе машины, равна силе, умноженной на скорость на выходе, то есть,
Идеальное механическое преимущество — это отношение силы, выходящей из машины (нагрузки), к силе, входящей в машину (усилию), или
Применение соотношения постоянной мощности дает формулу для идеального механического преимущества с точки зрения соотношения скоростей:
Коэффициент скорости машины можно рассчитать из ее физических размеров. Таким образом, предположение о постоянной мощности позволяет использовать коэффициент скорости для определения максимального значения механического преимущества.
Фактическое механическое преимущество (AMA) — это механическое преимущество, определяемое путем физического измерения входных и выходных сил. Фактическое механическое преимущество учитывает потери энергии из-за прогиба, трения и износа.
АМА машины рассчитывается как отношение измеренной выходной силы к измеренной входной силе,
где входные и выходные силы определяются экспериментально.
Отношение экспериментально определенного механического преимущества к идеальному механическому преимуществу представляет собой механический КПД η машины,




















