

Луноход (рус. Луноход , IPA: [lʊnɐˈxot] , «Луноход») — серия советских роботизированных лунных роверов , разработанных для посадки на Луну в период с 1969 по 1977 год. Луноход-1 был первым дистанционно управляемым роботом, совершившим посадку на внеземное тело.
Луноход 1А 1969 года (Луноход 0, Луноход № 201) был разрушен во время запуска, Луноход 1 1970 года и Луноход 2 1973 года совершили посадку на Луну, а Луноход 3 (Луноход № 205, запланированный на 1977 год) так и не был запущен. Успешные миссии проводились одновременно с сериями миссий «Зонд» и «Луна» по облету Луны, орбитальным миссиям и посадке на Луну.
Луноходы были в первую очередь разработаны для поддержки советских миссий по высадке человека на Луну во время лунной гонки . Вместо этого они использовались в качестве дистанционно управляемых роботов для исследования лунной поверхности и возвращения фотографий после высадки человека на Луну по программе «Аполлон» и отмены советской программы по высадке человека на Луну.
Луноходы были доставлены на поверхность Луны космическими аппаратами «Луна» , которые запускались ракетами-носителями «Протон-К» .

Первоначальной основной миссией Лунохода было стать резервом для пилотируемых лунных экспедиций Л3 и для более поздней лунной базы «Звезда» . [ требуется ссылка ] В целях безопасности миссии, за несколько недель до пилотируемой миссии на посадочном модуле ЛК , на Луну будут отправлены беспилотный посадочный модуль ЛК-Р из лунного экспедиционного комплекса Л3 и два автоматических лунохода «Луноход» для предварительного изучения поверхности вокруг мест посадки ЛК-Р и ЛК, чтобы они действовали в качестве радиомаяков для точной посадки ЛК-Р и ЛК, а также для визуальной оценки состояния места. [1]
В середине 1968 года на объекте КИП-10 или НИП-10 (КИП-10 или НИП-10, расположенном в точке с координатами 45°03′10″N 33°53′25″E / 45.052703°N 33.890256°E / 45.052703; 33.890256 ) [2] в закрытом городе Школьное (Симферополь-28) , недалеко от Симферополя , Крым , был открыт лунодром (лунодром - Moondrome, расположен в точке с координатами 45°03′15″N 33°53′37″E / 45.054212°N 33.893627°E / 45.054212; 33.893627 ) был построен. Он занимал площадь в один гектар (120 метров на 70 метров) и был очень похож на некоторые части лунной поверхности. Он был построен с использованием более 3000 кубических метров почвы и включал 54 кратера диаметром до 16 метров и около 160 камней разных размеров. [3] Вся территория была окружена кирпичами, окрашенными в серый и черный цвета. Он использовался для анализа проблем с шасси Лунохода и навыков космонавта управлять им. [4] [5]
Закрытый город Симферополь-28 содержал самый значительный объект слежения в Советском Союзе, имея наибольшее количество антенн, самую большую площадь и самый большой персонал из всех советских объектов слежения. Объект был одним из десяти объектов, которые содержат оборудование слежения за земными спутниками и обеспечивают управление/контроль для советских околокосмических гражданских и военных мероприятий. Кроме того, этот объект поддерживал все лунные программы Советского Союза совместно с Евпаторийским объектом слежения за дальним космосом . [6] [7]
Было построено не менее четырех полных автомобилей с серийными номерами 201, 203, 204 и 205. [ необходима цитата ]


Луноходы представляли собой лунные транспортные средства, состоящие из отсека в форме ванны с большой выпуклой крышкой на восьми независимо приводимых колесах. Они были оснащены конусообразной антенной, остронаправленной спиральной антенной , телевизионными камерами и специальными выдвижными устройствами для воздействия на лунный грунт для измерения плотности и испытаний механических свойств, а также научной полезной нагрузкой, которая менялась в зависимости от миссии.
Луноходы были спроектированы под руководством Георгия Бабакина [8] в ОКБ Лавочкина . Сами металлические шасси были спроектированы Александром Кемурджианом .
Транспортные средства питались от батарей . Марсоход работал в течение лунного дня, время от времени останавливаясь для подзарядки батарей с помощью солнечных панелей. Питание в течение лунного дня обеспечивалось солнечной батареей GaAs на внутренней стороне круглой откидной крышки, которая закрывала отсек для инструментов, которая заряжала батареи при открытии. Во время лунных ночей крышка была закрыта, а нагревательный блок на радиоизотопе полония-210 поддерживал внутреннюю температуру при рабочей температуре . [9]
Чтобы обеспечить работу в вакууме, для механических частей марсохода использовалась специальная смазка на основе фторида , а электродвигатели, по одному в каждой ступице колеса, были заключены в герметичные контейнеры. [10] [11]
Марсоходы были высотой 135 сантиметров (4 фута 5 дюймов) и имели массу 840 кг (1850 фунтов). Он был около 170 сантиметров (5 футов 7 дюймов) в длину и 160 сантиметров (5 футов 3 дюйма) в ширину и имел восемь колес каждое с независимой подвеской, двигателем и тормозом. Марсоход имел две скорости, приблизительно 1 и 2 км/ч (0,6 и 1,2 миль/ч).
Луноходы были доставлены на поверхность Луны космическими аппаратами «Луна» , которые запускались ракетами «Протон-К» . Часть лунного модуля космического аппарата «Луна» для луноходов была аналогична той, которая использовалась для миссий по возвращению образцов .
После многих лет секретных инженерных разработок и обучения первый Луноход (аппарат 8ЕЛ№201) был запущен 19 февраля 1969 года. В течение нескольких секунд ракета распалась, и первый Луноход был потерян. Остальной мир узнал о ценном грузе ракеты лишь спустя годы. [12] В результате неудачи радиоактивный источник тепла, полоний-210 , распространился по большой территории России. [13]
.jpg/1280px-FP2A3576_(23497689198).jpg)
_(6).jpg/1280px-USSR_Lunokhod_1_(6586684979)_(6).jpg)
После уничтожения оригинального Лунохода советские инженеры немедленно начали работу над другим лунным транспортным средством. Луноход 1 (транспортное средство 8ЕЛ№203) был первым из двух беспилотных лунных вездеходов, успешно приземлившихся на Луну Советским Союзом в рамках программы «Луноход». Космический аппарат, на борту которого находился Луноход 1, был назван Луна 17. Луноход 1 был первым передвижным дистанционно управляемым роботом, совершившим посадку на другой планете.
Луна-17 была запущена 10 ноября 1970 года в 14:44:01 UTC. После достижения околоземной парковочной орбиты последняя ступень ракеты- носителя Луны-17 включилась, чтобы вывести ее на траекторию к Луне (10 ноября 1970 года в 14:54 UTC). После двух корректирующих маневров курса (12 и 14 ноября) она вышла на лунную орбиту 15 ноября 1970 года в 22:00 UTC.
Космический аппарат совершил мягкую посадку на Луну в Море Дождей 17 ноября 1970 года в 03:47 UTC. Посадочный модуль имел двойные рампы, с которых полезная нагрузка, Луноход 1 , могла спускаться на поверхность. В 06:28 UT марсоход спустился по рампам и ступил на Луну.
Полезная нагрузка марсохода включала камеры (две телевизионные и четыре панорамных телефотометра), рентгенофлуоресцентный спектрометр РИФМА , рентгеновский телескоп РТ -1 , одометр/пенетрометр ПрОП, детектор радиации РВ-2Н и лазерный ретрорефлектор ТЛ. [14]
В Советском Союзе была распространена городская легенда о том, что луноходом управлял « гном из КГБ » [15] , однако никогда не объяснялось, как хранились припасы, необходимые для поддержания их жизнедеятельности в течение 11-месячной миссии.

Луноход-2 (аппарат 8ЕЛ№204) был вторым и более совершенным из двух луноходов. Ракета-носитель вывела космический аппарат на околоземную парковочную орбиту 8 января 1973 года, после чего последовал транслунный вывод . 12 января 1973 года Луна-21 была выведена на лунную орбиту размером 90 на 100 км (56 на 62 мили).
Космический аппарат «Луна-21» совершил посадку на Луну для запуска второго советского лунохода « Луноход-2» . Основными целями миссии были сбор изображений лунной поверхности, изучение уровней внешней освещенности для определения возможности проведения астрономических наблюдений с Луны, проведение экспериментов по лазерной локации с Земли, наблюдение за солнечным рентгеновским излучением, измерение локальных магнитных полей и изучение механических свойств материала лунной поверхности.
Посадка произошла 15 января 1973 года в 23:35 по всемирному времени в кратере Ле Монье (25,85 градуса с.ш., 30,45 градуса в.д.).
После приземления « Луноход-2» сделал телевизионные снимки окружающей местности, а затем скатился по пандусу на поверхность в 01:14 UT 16.01.1973. Затем он сделал снимки посадочного модуля «Луна-21» и места посадки.
Ровер был оборудован тремя медленно сканирующими телевизионными камерами, одна из которых была установлена высоко на ровере для навигации, которая могла возвращать изображения высокого разрешения с разной скоростью — 3,2, 5,7, 10,9 или 21,1 секунды на кадр (не кадры в секунду). Эти изображения использовались командой из пяти человек-контролеров на Земле, которые отправляли команды управления ровером в режиме реального времени. [16] На ровере было установлено четыре панорамные камеры.
Научные приборы включали в себя испытательную машину для определения механических свойств грунта , прибор для экспериментов с солнечным рентгеновским излучением, астрофотометр для измерения уровней видимого и ультрафиолетового света, магнитометр, установленный перед марсоходом на конце 2,5- метровой (8 футов 2 дюйма) стрелы, радиометр , фотодетектор (Рубин-1) для экспериментов по обнаружению лазерного излучения и поставленный Францией лазерный уголковый отражатель .

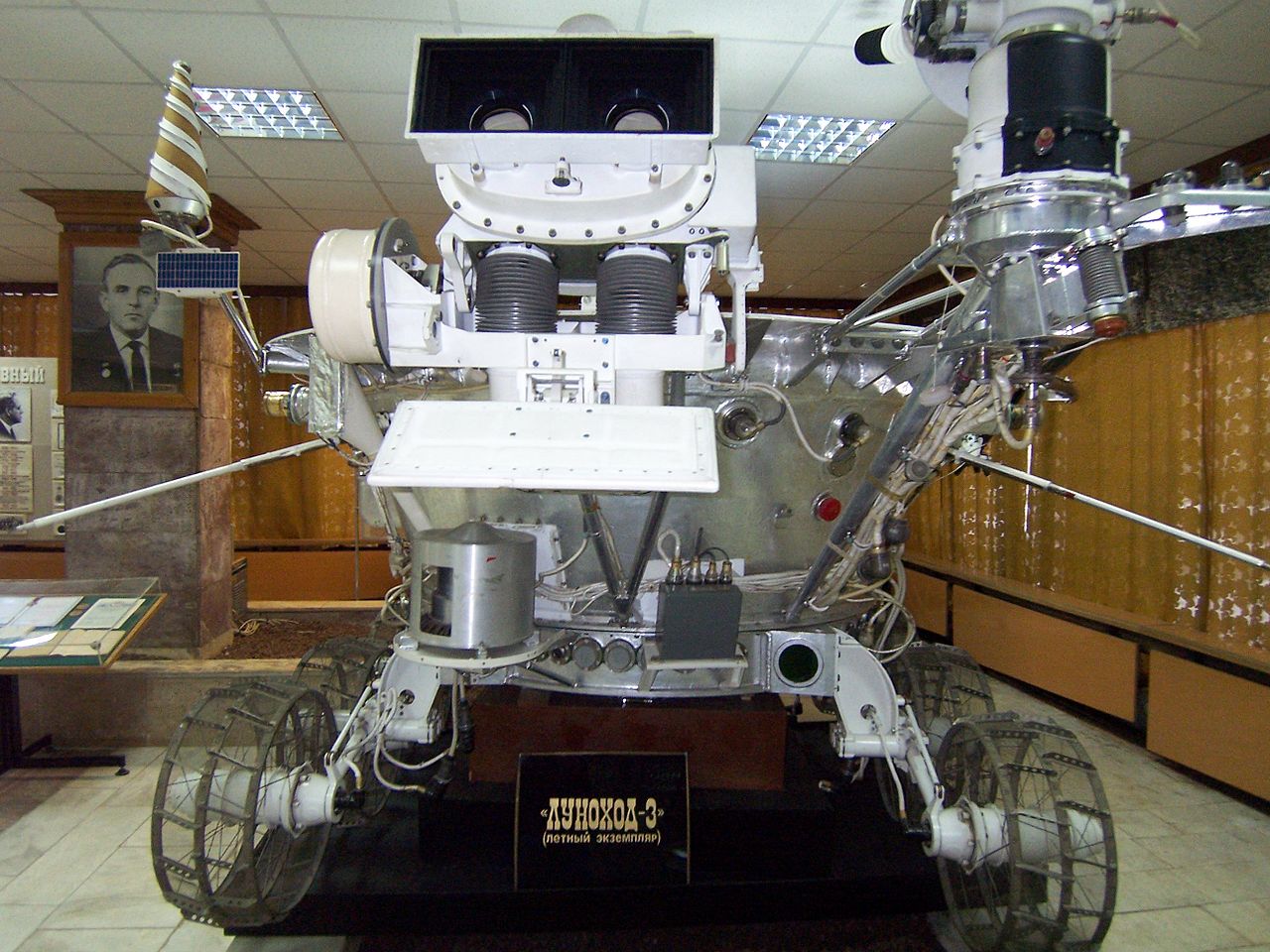
Луноход-3 (аппарат 8ЕЛ№205) был построен для высадки на Луну в 1977 году под названием Луна-25 , [17] но так и не полетел на Луну из-за отсутствия пусковых установок и финансирования. Он находится в музее НПО Лавочкина. [18]
За 322 земных дня работы «Луноход-1» прошёл 10,5 км (6,5 миль) и передал более 20 000 телевизионных изображений и 206 панорам высокого разрешения. [19] Кроме того, он выполнил двадцать пять анализов почвы с помощью рентгенофлуоресцентного спектрометра RIFMA и использовал свой пенетрометр в 500 различных местах.
Луноход-2 проработал около четырех месяцев, покрыл 42 км (26 миль) местности, [20] включая проезд по холмистым возвышенностям и оврагам . Луноход-2 удерживал рекорд по самому большому расстоянию наземного путешествия среди всех внеземных транспортных средств до 2014 года. [12] Он передал 86 панорамных снимков и более 80 000 телевизионных изображений. За это время было завершено множество механических испытаний поверхности Луны, лазерных локационных измерений и других экспериментов.
В 2010 году, почти через сорок лет после потери сигнала с Лунохода-1 в 1971 году , лунный разведывательный орбитальный аппарат НАСА сфотографировал его следы и окончательное местоположение, а исследователи, используя телескопический импульсный лазерный дальномер, обнаружили ретрорефлектор робота . [21]
Только после развертывания Mars Pathfinder марсохода " Sojourner " в 1997 году на внеземном теле появился еще один дистанционно управляемый аппарат. Для сравнения, марсоходы NASA Mars Exploration Rovers аналогичного размера Spirit и Opportunity к своей пятой годовщине в январе 2009 года проехали в общей сложности 21 км (13 миль) и передали более 125 000 изображений. [22]
Согласно французскому документальному телевизионному фильму «Танк на Луне» Жана Афанасьева, проект Лунохода вернулся в центр внимания 15 лет спустя из-за катастрофы на Чернобыльской АЭС 26 апреля 1986 года. [23] Дистанционно управляемые бульдозеры, построенные в Восточной Германии и доступные советским войскам гражданской обороны , весили десятки тонн — слишком тяжелые, чтобы работать на оставшихся частях частично обрушившейся крыши здания реактора. Людей нельзя было использовать для сгребания мусора, поскольку рабочие смены были ограничены 90-секундными интервалами из-за интенсивного ионизирующего излучения . [24]
Разработчики Лунохода были отозваны с пенсии, и через две недели были созданы вездеходы, которые использовали источники ядерного распада для внутреннего климат-контроля стеллажа, их электронные системы уже были закалены, чтобы частично противостоять радиации. [23] Это преимущество позволило конструкторам 1986 года быстро разработать производный тип транспортного средства для работ по ликвидации последствий ядерной катастрофы. 15 июля два вездехода, названные STR-1, [12] были доставлены в зону аварии на Чернобыльской АЭС и оказались полезными для расчистки мусора, за что конструкторы получили награды. Из-за чрезвычайно высокого уровня радиации оба вездехода STR-1 в конечном итоге вышли из строя, и рабочие-люди (позже названные ликвидаторами ) были вызваны снова. [23] [25]

До 2010 года окончательное местоположение Лунохода-1 было неопределенным с точностью в несколько километров. [26] Эксперименты по лазерной локации Луны не смогли обнаружить ответный сигнал от его ретрорефлектора с 1970-х годов. [27] 17 марта 2010 года Альберт Абдрахимов обнаружил и посадочный модуль, и марсоход [28] на снимке M114185541RC, полученном с Lunar Reconnaissance Orbiter . [29] 22 апреля Том Мерфи ( UCSD ) и Рассет Макмиллан в обсерватории Apache Point обнаружили ретрорефлектор робота с помощью телескопического импульсного лазерного дальномера Apache Point. [21]
Луноход-2 продолжает обнаруживаться с помощью экспериментов по лазерной локации Луны , и его местоположение известно с точностью до метра. Право собственности на Луноход-2 и посадочный модуль Луна-21 было продано Ассоциацией Лавочкина за 68 500 долларов США в декабре 1993 года на аукционе Sotheby's в Нью-Йорке [30] (хотя в каталоге лот 68A ошибочно указан как Луна-17/Луноход-1 ). [31] Покупателем был предприниматель в области компьютерных игр и сын астронавта Ричард Гэрриот , который также известен по имени своего игрового персонажа Лорда Бритиша . Гэрриот заявил в интервью 2001 года: «Я купил Lunakod 21 [ так в оригинале ] у русских. Теперь я единственный в мире частный владелец объекта на иностранном небесном теле. Хотя существуют международные договоры, которые гласят, что ни одно правительство не должно претендовать на географию за пределами планеты Земля, я не являюсь правительством. Короче говоря, я заявляю права на Луну от имени Лорда Бритиша !» [32] В 2007 году Гэрриот сказал, что он по-прежнему является владельцем Lunokhod 2. [ 33] [34]