
В математике поверхность Зейферта (названная в честь немецкого математика Герберта Зейферта [1] [2] ) — это ориентируемая поверхность , границей которой является заданный узел или связь .
Такие поверхности могут быть использованы для изучения свойств соответствующего узла или связи. Например, многие инварианты узлов проще всего вычислить с помощью поверхности Зейферта. Поверхности Зейферта также интересны сами по себе и являются предметом значительных исследований.
В частности, пусть L — это ориентированный узел или зацепление в евклидовом 3-пространстве (или в 3-сфере ). Поверхность Зейферта — это компактная , связная , ориентированная поверхность S, вложенная в 3-пространство, граница которой — L , такая, что ориентация на L — это просто индуцированная ориентация из S.
Обратите внимание, что любая компактная, связная, ориентированная поверхность с непустой границей в евклидовом 3-пространстве является поверхностью Зейферта, связанной с ее граничным звеном. Один узел или звено может иметь много различных неэквивалентных поверхностей Зейферта. Поверхность Зейферта должна быть ориентированной . Также возможно связать поверхности с узлами, которые не являются ни ориентированными, ни ориентируемыми.

Стандартная лента Мёбиуса имеет границу в виде узла , но не является поверхностью Зейферта для узла, поскольку она неориентируема.
Раскраска «шахматной доски» обычной минимальной пересекающейся проекции узла трилистника дает ленту Мёбиуса с тремя полуповоротами. Как и в предыдущем примере, это не поверхность Зейферта, поскольку она неориентируема. Применение алгоритма Зейферта к этой диаграмме, как и ожидалось, действительно дает поверхность Зейферта; в этом случае это проколотый тор рода g = 1, а матрица Зейферта равна
Это теорема о том, что любая связь всегда имеет связанную с ней поверхность Зейферта. Эта теорема была впервые опубликована Франклом и Понтрягиным в 1930 году. [3] Другое доказательство было опубликовано в 1934 году Гербертом Зейфертом и опирается на то, что сейчас называется алгоритмом Зейферта. Алгоритм создает поверхность Зейферта , учитывая проекцию рассматриваемого узла или связи.
Предположим, что link имеет m компонент ( m = 1 для узла), диаграмма имеет d точек пересечения, и разрешение пересечений (сохраняя ориентацию узла) дает f окружностей. Тогда поверхность строится из f непересекающихся дисков путем присоединения d полос. Группа гомологии является свободной абелевой на 2 g образующих, где
является родом . Форма пересечения Q на кососимметрична , и существует базис из 2 g циклов с равным прямой сумме g копий матрицы
Целочисленная матрица Зейферта размером 2 g × 2 g
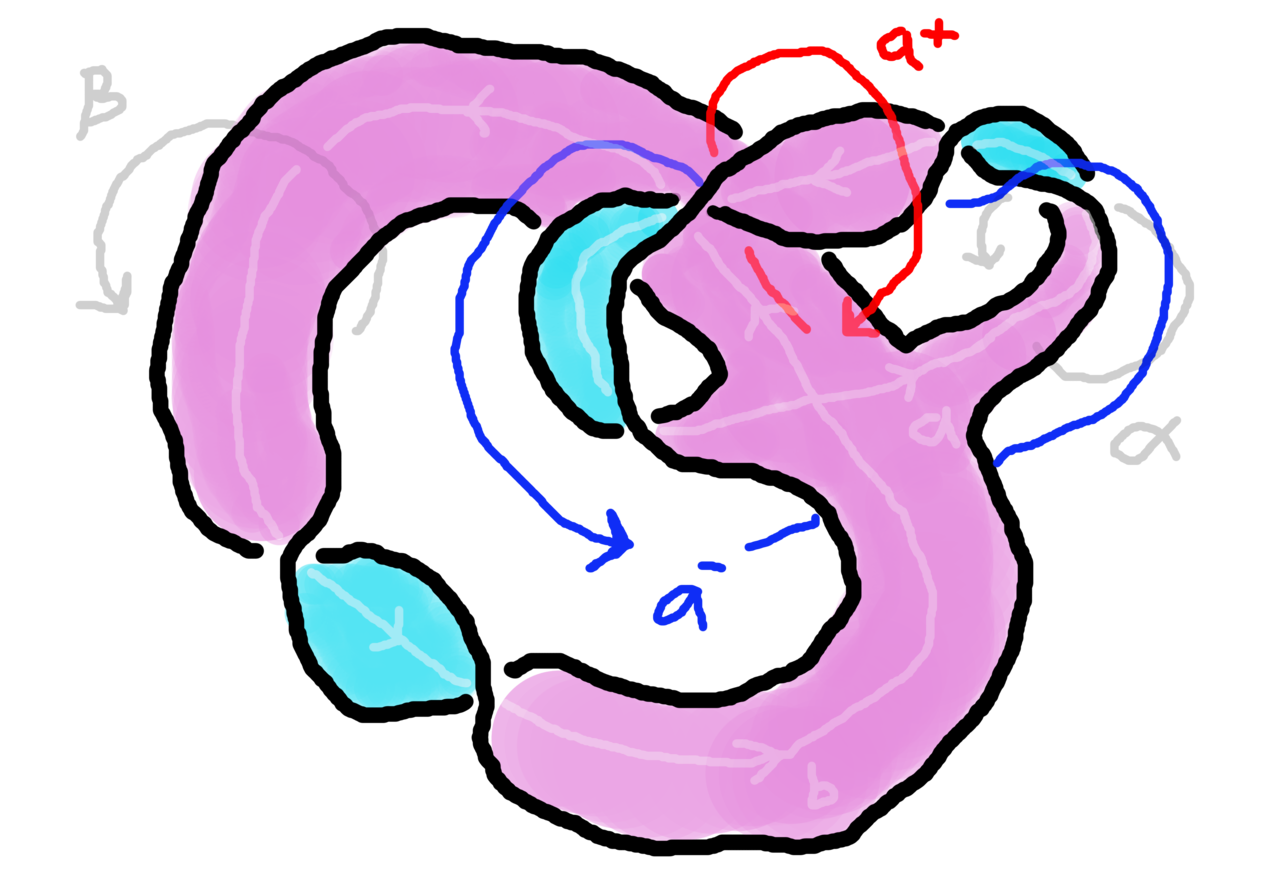
имеет число связей в евклидовом 3-пространстве (или в 3-сфере ) для a i и "выталкивание" a j в положительном направлении . Точнее, вспоминая, что поверхности Зейферта являются двустворчатыми, что означает, что мы можем расширить вложение до вложения , учитывая некоторую представительную петлю , которая является генератором гомологии внутри , положительное выталкивание равно , а отрицательное выталкивание равно . [4]
С этим у нас есть
где V ∗ = ( v ( j , i )) транспонированная матрица. Каждая целая матрица 2 g × 2 g с возникает как матрица Зейферта узла с родом g поверхности Зейферта.
Полином Александера вычисляется из матрицы Зейферта, по которой является полиномом степени не выше 2g от неопределенности. Полином Александера не зависит от выбора поверхности Зейферта и является инвариантом узла или зацепления.
Сигнатура узла — это сигнатура симметричной матрицы Зейферта. Это снова инвариант узла или связи.
Поверхности Зейферта вовсе не уникальны: поверхность Зейферта S рода g и матрица Зейферта V могут быть изменены топологической хирургией , что приведет к поверхности Зейферта S ′ рода g + 1 и матрице Зейферта
Род узла K — это инвариант узла, определяемый минимальным родом g поверхности Зейферта для K.
Например:
Фундаментальным свойством рода является то, что он аддитивен по отношению к сумме узлов :
В общем случае род узла трудно вычислить, и алгоритм Зейферта обычно не создает поверхность Зейферта наименьшего рода. По этой причине иногда полезны другие связанные инварианты. Канонический род узла — это наименьший род всех поверхностей Зейферта, которые могут быть построены алгоритмом Зейферта, а свободный род — это наименьший род всех поверхностей Зейферта, дополнением которых в является handlebody . (Дополнение поверхности Зейферта, сгенерированное алгоритмом Зейферта, всегда является handlebody.) Для любого узла неравенство, очевидно, выполняется, поэтому, в частности, эти инварианты устанавливают верхние границы рода. [5]
Род узлов является NP-полным согласно работе Яна Эйгола , Джоэла Хасса и Уильяма Терстона . [6]
Было показано, что существуют поверхности Зейферта того же рода, которые не становятся изотопными ни топологически, ни гладко в 4-шаре. [7] [8]









![{\displaystyle S\times [-1,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e47ae91617b44e3a2f91d571aa9a3e4cffd4137a)















