Раздел физики, описывающий движение объектов без учета сил.
Кинематика — это подраздел физики и математики , разработанный в классической механике , который описывает движение точек, тел (объектов) и систем тел (групп объектов) без учета сил , которые заставляют их двигаться. [1] [2] [3] Кинематика, как область изучения, часто упоминается как «геометрия движения» и иногда рассматривается как раздел как прикладной, так и чистой математики, поскольку ее можно изучать без учета массы тела или сил, действующих на него. [4] [5] [6] Задача кинематики начинается с описания геометрии системы и объявления начальных условий любых известных значений положения, скорости и/или ускорения точек внутри системы. Затем, используя аргументы из геометрии, можно определить положение, скорость и ускорение любых неизвестных частей системы. Изучение того, как силы действуют на тела, относится к кинетике , а не кинематике. Для получения более подробной информации см. аналитическую динамику .
Кинематика используется в астрофизике для описания движения небесных тел и совокупностей таких тел. В машиностроении , робототехнике и биомеханике [7] кинематика используется для описания движения систем, состоящих из соединенных частей (многозвенных систем), таких как двигатель , роботизированная рука или человеческий скелет .
Кинематический анализ — это процесс измерения кинематических величин, используемых для описания движения. Например, в инженерии кинематический анализ может использоваться для нахождения диапазона движения для данного механизма и, работая в обратном направлении, использовать кинематический синтез для проектирования механизма для желаемого диапазона движения. [8] Кроме того, кинематика применяет алгебраическую геометрию для изучения механического преимущества механической системы или механизма.
Этимология
Термин «кинематический» является английской версией термина AM Ampère cinématique [ 9] , который он создал из греческого κίνημα kinema («движение, перемещение»), которое в свою очередь произошло от κινεῖν kinein («двигаться»). [10] [11]
Kinematic и cinématique связаны с французским словом cinéma, но ни одно из них не произошло от него напрямую. Однако у них есть общий корень, так как cinéma произошло от сокращенной формы cinématographe, «кинопроектор и камера», опять же от греческого слова, обозначающего движение, и от греческого γρᾰ́φω grapho («писать»). [12]
Кинематика траектории частицы в невращающейся системе отсчета
Кинематические величины классической частицы: масса m , положение r , скорость v , ускорение a .
Кинематические векторы в плоских полярных координатах. Обратите внимание, что настройка не ограничена двумерным пространством, а плоскостью в любом более высоком измерении.
Кинематика частиц — это изучение траектории частиц. Положение частицы определяется как вектор координат от начала координатной системы до частицы. Например, рассмотрим башню в 50 м к югу от вашего дома, где центр координатной системы находится в вашем доме, так что восток находится в направлении оси x , а север — в направлении оси y , тогда вектор координат до основания башни равен r = (0 м, −50 м, 0 м). Если высота башни составляет 50 м, и эта высота измеряется вдоль оси z , то вектор координат до вершины башни равен r = (0 м, −50 м, 50 м).
В самом общем случае для определения положения частицы используется трехмерная система координат. Однако, если частица ограничена движением в плоскости, достаточно двухмерной системы координат. Все наблюдения в физике неполны, если они не описаны относительно системы отсчета.
Вектор положения частицы — это вектор, проведенный из начала системы отсчета к частице. Он выражает как расстояние точки от начала координат, так и ее направление от начала координат. В трех измерениях вектор положения можно выразить как
, , и — декартовы координаты , а , и — единичные векторы вдоль осей координат , , и соответственно. Величина вектора положения дает расстояние между точкой и началом координат.
Направляющие косинусы вектора положения обеспечивают количественную меру направления. В общем случае вектор положения объекта будет зависеть от системы отсчета; разные системы отсчета приведут к разным значениям вектора положения.
Траектория частицы является векторной функцией времени , которая определяет кривую, прокладываемую движущейся частицей, заданную соотношением, где
, , и описывают каждую координату положения частицы как функцию времени.
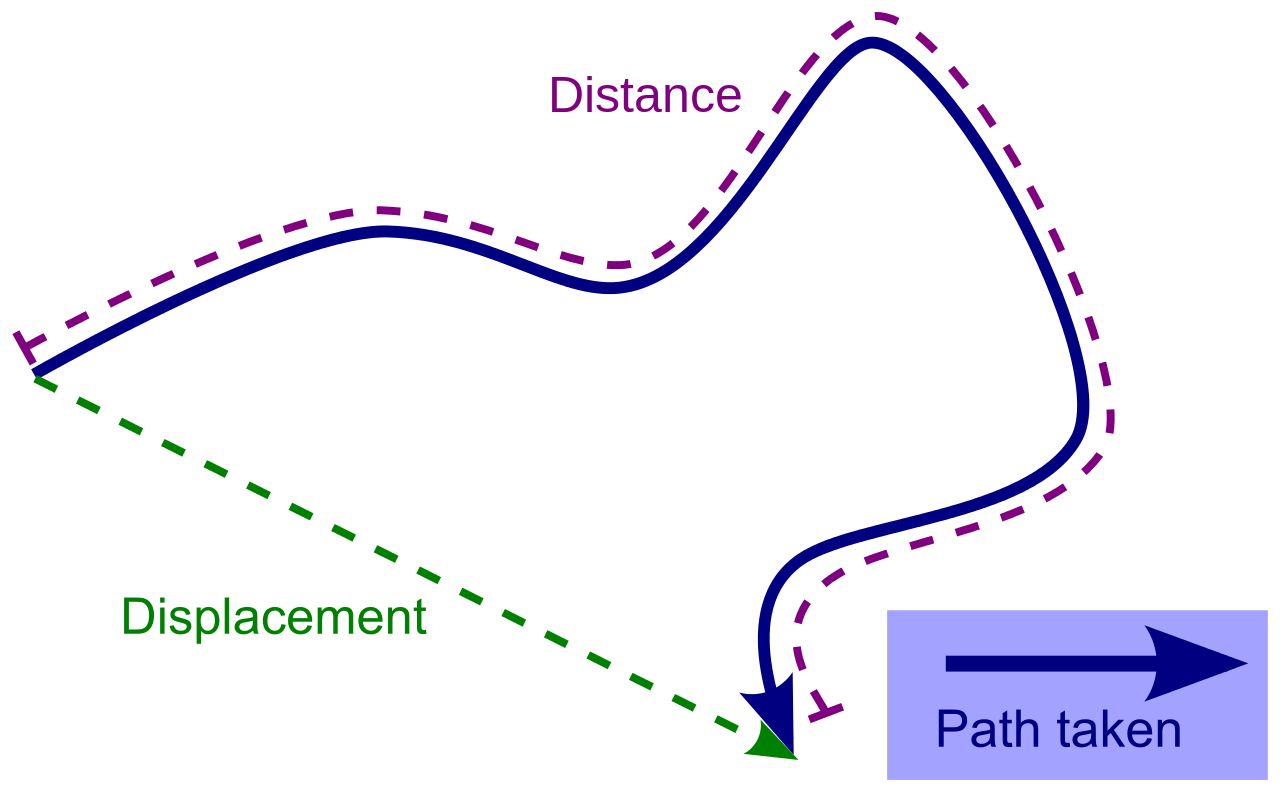
Пройденное расстояние всегда больше или равно перемещению.
Скорость и быстрота
Скорость частицы — это векторная величина, которая описывает направление , а также величину движения частицы. Более математически, скорость изменения вектора положения точки по времени — это скорость точки. Рассмотрим отношение, образованное путем деления разности двух положений частицы ( смещение ) на временной интервал. Это отношение называется средней скоростью за этот временной интервал и определяется как где — вектор смещения за временной интервал . В пределе, когда временной интервал стремится к нулю, средняя скорость приближается к мгновенной скорости, определяемой как производная по времени вектора положения.
Таким образом, скорость частицы — это скорость изменения ее положения по времени. Кроме того, эта скорость касается траектории частицы в каждой точке ее пути. В невращающейся системе отсчета производные направлений координат не рассматриваются, поскольку их направления и величины являются константами.
Скорость объекта — это величина его скорости. Это скалярная величина:
где — длина дуги, измеренная вдоль траектории частицы. Эта длина дуги должна всегда увеличиваться по мере движения частицы. Следовательно, неотрицательна , что подразумевает, что скорость также неотрицательна.
Ускорение
Вектор скорости может изменяться по величине и направлению или по обоим параметрам одновременно. Следовательно, ускорение учитывает как скорость изменения величины вектора скорости, так и скорость изменения направления этого вектора. Те же рассуждения, которые использовались в отношении положения частицы для определения скорости, можно применить к скорости для определения ускорения. Ускорение частицы — это вектор, определяемый скоростью изменения вектора скорости. Среднее ускорение частицы за интервал времени определяется как отношение.
где Δ v — средняя скорость, а Δ t — интервал времени.
Ускорение частицы является пределом среднего ускорения, когда интервал времени приближается к нулю, что является производной по времени,
В качестве альтернативы,
Таким образом, ускорение является первой производной вектора скорости и второй производной вектора положения этой частицы. В невращающейся системе отсчета производные направлений координат не рассматриваются, поскольку их направления и величины являются константами.
Величина ускорения объекта — это величина | a | вектора его ускорения. Это скалярная величина:
Вектор относительного положения
Вектор относительного положения — это вектор, который определяет положение одной точки относительно другой. Это разница в положении двух точек. Положение одной точки A относительно другой точки B — это просто разница между их положениями
что представляет собой разницу между компонентами их векторов положения.
Если точка А имеет компоненты положения
и точка B имеет компоненты положения
тогда положение точки А относительно точки В равно разности их компонентов:
Относительная скорость
Относительные скорости между двумя частицами в классической механике.
Скорость одной точки относительно другой — это просто разность их скоростей,
которая, в свою очередь, является разностью компонентов их скоростей.
Если точка A имеет компоненты скорости , а точка B имеет компоненты скорости , то скорость точки A относительно точки B равна разности их компонентов:
В качестве альтернативы этот же результат можно получить, вычислив производную по времени вектора относительного положения r B/A .
Относительное ускорение
Ускорение одной точки C относительно другой точки B — это просто разность их ускорений,
которая, в свою очередь, является разностью компонентов их ускорений.
Если точка C имеет компоненты ускорения
, а точка B имеет компоненты ускорения
, то ускорение точки C относительно точки B равно разности их компонентов:
В качестве альтернативы этот же результат можно получить, вычислив вторую производную по времени относительного вектора положения r B/A . [13]
Предполагая, что начальные условия положения , и скорости в момент времени известны, первое интегрирование дает скорость частицы как функцию времени. [a]
Второе интегрирование дает его путь (траекторию),
Дополнительные соотношения между смещением, скоростью, ускорением и временем могут быть получены. Поскольку ускорение постоянно, можно подставить в приведенное выше уравнение, чтобы получить:
Связь между скоростью, положением и ускорением без явной зависимости от времени можно получить, решив среднее ускорение по времени и подставив и упростив
где обозначает скалярное произведение , что вполне уместно, поскольку произведения являются скалярами, а не векторами.
В случае, если ускорение всегда направлено в сторону движения, а направление движения должно быть положительным или отрицательным, угол между векторами ( α ) равен 0, поэтому и
Это можно упростить, используя обозначение для величин векторов [ требуется ссылка ] , где может быть любой криволинейной траекторией, поскольку постоянное тангенциальное ускорение приложено вдоль этой траектории [ требуется ссылка ] , поэтому
Это сводит параметрические уравнения движения частицы к декартовой зависимости скорости от положения. Эта зависимость полезна, когда время неизвестно. Мы также знаем, что или — это площадь под графиком скорости–времени. [15]
График физики скорости и времени
Мы можем взять , сложив верхнюю площадь и нижнюю площадь. Нижняя площадь представляет собой прямоугольник, а площадь прямоугольника равна , где — ширина, а — высота. В этом случае и ( здесь отличается от ускорения ). Это означает, что нижняя площадь равна . Теперь давайте найдем верхнюю площадь (треугольник). Площадь треугольника равна , где — основание, а — высота. [16] В этом случае и или . Добавление и приводит к уравнению приводит к уравнению . [17] Это уравнение применимо, когда конечная скорость v неизвестна.
Рисунок 2: Скорость и ускорение для неравномерного кругового движения: вектор скорости направлен по касательной к орбите, но вектор ускорения не направлен радиально внутрь из-за его тангенциальной составляющей a θ , которая увеличивает скорость вращения: d ω /d t = | a θ |/ R .
Траектории частиц в цилиндрически-полярных координатах
Часто бывает удобно сформулировать траекторию частицы r ( t ) = ( x ( t ), y ( t ), z ( t )) с помощью полярных координат в плоскости X – Y. В этом случае ее скорость и ускорение принимают удобный вид.
Напомним, что траектория частицы P определяется ее координатным вектором r, измеренным в неподвижной системе отсчета F. По мере движения частицы ее координатный вектор r ( t ) описывает ее траекторию, которая представляет собой кривую в пространстве, заданную формулой:
где x̂ , ŷ , и ẑ — единичные векторы вдоль осей x , y и z системы отсчета F соответственно.
Рассмотрим частицу P , которая движется только по поверхности кругового цилиндра r ( t ) = const, можно совместить ось z неподвижной системы отсчета F с осью цилиндра. Тогда угол θ вокруг этой оси в плоскости x – y можно использовать для определения траектории как,
где постоянное расстояние от центра обозначается как r , а θ ( t ) является функцией времени.
Цилиндрические координаты для r ( t ) можно упростить, введя радиальные и тангенциальные единичные векторы
и их производные по времени из элементарного исчисления:
Используя эту нотацию, r ( t ) принимает вид,
В общем случае траектория r ( t ) не ограничена тем, чтобы лежать на круговом цилиндре, поэтому радиус R изменяется со временем, а траектория частицы в цилиндрически-полярных координатах становится:
Где r , θ , и z могут быть непрерывно дифференцируемыми функциями времени, а обозначение функции опущено для простоты. Вектор скорости v P является производной по времени траектории r ( t ), что дает:
Аналогично, ускорение a P , которое является производной по времени скорости v P , определяется по формуле:
Если траектория частицы ограничена цилиндром, то радиус r постоянен, а векторы скорости и ускорения упрощаются. Скорость v P является производной по времени траектории r ( t ),
Плоские круговые траектории
Каждая частица на колесе движется по плоской круговой траектории (Кинематика машин, 1876). [18]
Частный случай траектории частицы на круговом цилиндре имеет место, когда нет движения вдоль оси z :
где r и z 0 — константы. В этом случае скорость v P определяется по формуле:
где — угловая скорость единичного вектора θ ^ вокруг оси z цилиндра.
Ускорение a P частицы P теперь определяется выражением:
Компоненты
называются соответственно радиальной и тангенциальной составляющими ускорения.
Обозначение угловой скорости и углового ускорения часто определяется как ,
поэтому радиальные и тангенциальные компоненты ускорения для круговых траекторий также записываются как
Траектории точек тела, движущегося в плоскости
Движение компонентов механической системы анализируется путем прикрепления опорной системы к каждой части и определения того, как различные опорные системы движутся относительно друг друга. Если структурная жесткость частей достаточна, то их деформацией можно пренебречь и использовать жесткие преобразования для определения этого относительного движения. Это сводит описание движения различных частей сложной механической системы к проблеме описания геометрии каждой части и геометрической ассоциации каждой части относительно других частей.
Геометрия — это изучение свойств фигур, которые остаются неизменными, в то время как пространство преобразуется различными способами — более технически, это изучение инвариантов при наборе преобразований. [19] Эти преобразования могут вызвать смещение треугольника на плоскости, оставляя при этом угол при вершине и расстояния между вершинами неизменными. Кинематика часто описывается как прикладная геометрия, где движение механической системы описывается с помощью жестких преобразований евклидовой геометрии.
Координаты точек на плоскости — двумерные векторы в R 2 (двумерное пространство). Жесткие преобразования — это те, которые сохраняют расстояние между любыми двумя точками. Множество жестких преобразований в n -мерном пространстве называется специальной евклидовой группой на R n и обозначается SE( n ) .
Смещения и движение
Движение каждого из компонентов паровой машины Болтона и Уатта (1784) моделируется непрерывным набором жестких перемещений.
Положение одного компонента механической системы относительно другого определяется введением системы отсчета, скажем, M , на одной из них, которая движется относительно неподвижной системы отсчета F на другой. Жесткое преобразование или смещение M относительно F определяет относительное положение двух компонентов. Смещение состоит из комбинации вращения и трансляции .
Множество всех перемещений точки M относительно F называется конфигурационным пространством точки M. Гладкая кривая из одного положения в другое в этом конфигурационном пространстве представляет собой непрерывное множество перемещений, называемое движением точки M относительно F. Движение тела состоит из непрерывного множества вращений и перемещений.
Матричное представление
Комбинация поворота и переноса в плоскости R 2 может быть представлена определенным типом матрицы 3×3, известной как однородное преобразование. Однородное преобразование 3×3 строится из матрицы поворота 2×2 A ( φ ) и вектора переноса 2×1 d = ( d x , d y ), как:
Эти однородные преобразования выполняют жесткие преобразования в точках плоскости z = 1, то есть в точках с координатами r = ( x , y , 1).
В частности, пусть r определяет координаты точек в системе отсчета M, совпадающей с неподвижной системой F. Тогда, когда начало M смещено на вектор переноса d относительно начала F и повернуто на угол φ относительно оси x F , новые координаты в F точек в M определяются как:
Однородные преобразования представляют собой аффинные преобразования . Эта формулировка необходима, поскольку перенос не является линейным преобразованием R 2 . Однако, используя проективную геометрию, так что R 2 рассматривается как подмножество R 3 , переносы становятся аффинными линейными преобразованиями. [20]
Чистый перевод
Если твердое тело движется так, что его система отсчета M не вращается ( θ = 0) относительно неподвижной системы F , движение называется чистым переносом. В этом случае траектория каждой точки тела является смещением траектории d ( t ) начала координат M, то есть:
Таким образом, для тел, находящихся в чистом поступательном движении, скорость и ускорение каждой точки P в теле определяются как:
где точка обозначает производную по времени, а v O и a O — скорость и ускорение, соответственно, начала движущейся системы отсчета M. Напомним, что вектор координат p в M постоянен, поэтому его производная равна нулю.
Вращение тела вокруг неподвижной оси
Рисунок 1: Вектор угловой скорости Ω направлен вверх для вращения против часовой стрелки и вниз для вращения по часовой стрелке, как указано в правиле правой руки . Угловое положение θ ( t ) изменяется со временем со скоростью ω ( t ) = d θ /d t .
Вращательная или угловая кинематика — это описание вращения объекта. [21] В дальнейшем внимание будет ограничено простым вращением вокруг оси фиксированной ориентации. Ось z была выбрана для удобства.
Позиция
Это позволяет описать вращение как угловое положение плоской системы отсчета M относительно фиксированной точки F вокруг этой общей оси z . Координаты p = ( x , y ) в M связаны с координатами P = (X, Y) в F матричным уравнением:
где
— матрица вращения, определяющая угловое положение точки М относительно точки F как функцию времени.
Скорость
Если точка p не движется в M , ее скорость в F определяется как
Удобно исключить координаты p и записать это как операцию над траекторией P ( t ),
где матрица
известна как матрица угловой скорости M относительно F. Параметр ω является производной по времени от угла θ , то есть:
Ускорение
Ускорение P ( t ) в F получается как производная скорости по времени,
которая становится
равной где
— матрица углового ускорения M в F , а
Описание вращения тогда включает в себя следующие три величины:
Угловое положение : ориентированное расстояние от выбранного начала координат на оси вращения до точки объекта — это вектор r ( t ), определяющий местоположение точки. Вектор r ( t ) имеет некоторую проекцию (или, что эквивалентно, некоторую компоненту) r ⊥ ( t ) на плоскость, перпендикулярную оси вращения. Тогда угловое положение этой точки — это угол θ от опорной оси (обычно положительной оси x ) к вектору r ⊥ ( t ) в известном направлении вращения (обычно задается правилом правой руки ).
Угловая скорость : угловая скорость ω — это скорость, с которой угловое положение θ изменяется относительно времени t : Угловая скорость представлена на рисунке 1 вектором Ω, направленным вдоль оси вращения с величиной ω и направлением, определяемым направлением вращения, как указано в правиле правой руки .
Угловое ускорение : величина углового ускорения α — это скорость, с которой угловая скорость ω изменяется относительно времени t :
Уравнения поступательной кинематики можно легко распространить на плоскую вращательную кинематику для постоянного углового ускорения с простыми переменными обмена:
Здесь θ i и θ f — соответственно начальное и конечное угловое положение, ω i и ω f — соответственно начальная и конечная угловые скорости, а α — постоянное угловое ускорение. Хотя положение в пространстве и скорость в пространстве являются истинными векторами (с точки зрения их свойств при вращении), как и угловая скорость, сам угол не является истинным вектором.
Траектории точек в теле, движущемся в трех измерениях
Важные формулы в кинематике определяют скорость и ускорение точек движущегося тела, когда они описывают траектории в трехмерном пространстве. Это особенно важно для центра масс тела, который используется для вывода уравнений движения с использованием либо второго закона Ньютона , либо уравнений Лагранжа .
Позиция
Для определения этих формул движение компонента B механической системы определяется набором вращений [A( t )] и перемещений d ( t ), собранных в однородное преобразование [T( t )]=[A( t ), d ( t )]. Если p — координаты точки P в B, измеренные в движущейся системе отсчета M , то траектория этой точки, отслеживаемая в F , задается следующим образом:
Эта нотация не делает различий между P = (X, Y, Z, 1) и P = (X, Y, Z), что, как мы надеемся, понятно из контекста.
Это уравнение для траектории P можно инвертировать, чтобы вычислить вектор координат p в M следующим образом:
Это выражение использует тот факт, что транспонированная матрица вращения также является ее обратной, то есть:
Скорость
Скорость точки P вдоль ее траектории P ( t ) получается как производная по времени этого вектора положения.
Точка обозначает производную по времени; поскольку p является константой, ее производная равна нулю.
Эту формулу можно модифицировать для получения скорости P , действуя на ее траекторию P ( t ), измеренную в неподвижной системе отсчета F. Подстановка обратного преобразования для p в уравнение скорости дает:
Матрица [ S ] задается как:
где
— матрица угловой скорости.
Умножая на оператор [ S ], формула для скорости v P принимает вид:
где вектор ω — вектор угловой скорости, полученный из компонент матрицы [Ω]; вектор —
положение точки P относительно начала координат O подвижной системы отсчета M ;
— скорость начала координат O.
Ускорение
Ускорение точки P в движущемся теле B находится как производная по времени от вектора ее скорости:
Это уравнение можно расширить, во-первых, вычислив
и
Формулу для ускорения AP теперь можно получить как:
или
где α — вектор углового ускорения, полученный из производной вектора угловой скорости;
— вектор относительного положения (положение P относительно начала координат O подвижной системы отсчета M );
— ускорение начала координат подвижной системы отсчета M.
Кинематические ограничения
Кинематические ограничения — это ограничения на движение компонентов механической системы. Кинематические ограничения можно рассматривать как имеющие две основные формы: (i) ограничения, возникающие из-за шарниров, ползунков и кулачковых соединений, которые определяют конструкцию системы, называемые голономными ограничениями , и (ii) ограничения, налагаемые на скорость системы, такие как ограничение лезвия коньков на плоской поверхности или качение без проскальзывания диска или сферы в контакте с плоскостью, которые называются неголономными ограничениями . Ниже приведены некоторые общие примеры.
Кинематическая связь
Кинематическая связь точно ограничивает все 6 степеней свободы.
Для случая, когда объект не наклоняется и не поворачивается, это уменьшается до .
Нерастягивающийся шнур
Это тот случай, когда тела соединены идеализированным шнуром, который остается в натяжении и не может менять длину. Ограничение заключается в том, что сумма длин всех сегментов шнура является общей длиной, и, соответственно, производная по времени этой суммы равна нулю. [22] [23] [24] Динамическая задача такого типа — маятник . Другой пример — барабан, вращаемый силой тяжести на падающем грузе, прикрепленном к ободу нерастяжимым шнуром. [25] Задача равновесия (т. е. не кинематическая) такого типа — цепная линия . [26]
Кинематические пары
Рело назвал идеальные соединения между компонентами, которые образуют машину, кинематическими парами . Он различал высшие пары, которые, как говорили, имели линейный контакт между двумя звеньями, и низшие пары, которые имели площадной контакт между звеньями. Дж. Филлипс показывает, что существует много способов построения пар, которые не соответствуют этой простой классификации. [27]
Нижняя пара
Нижняя пара — это идеальное соединение или голономная связь, которая поддерживает контакт между точкой, линией или плоскостью в движущемся твердом (трехмерном) теле и соответствующей точкой, линией или плоскостью в неподвижном твердом теле. Возможны следующие случаи:
Вращательная пара, или шарнирное соединение, требует, чтобы линия, или ось, в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, перпендикулярная этой линии в движущемся теле, поддерживала контакт с аналогичной перпендикулярной плоскостью в неподвижном теле. Это накладывает пять ограничений на относительное движение звеньев, которое, следовательно, имеет одну степень свободы, которая является чистым вращением вокруг оси шарнира.
Призматическое соединение , или ползун, требует, чтобы линия, или ось, в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, параллельная этой линии в движущемся теле, поддерживала контакт с аналогичной параллельной плоскостью в неподвижном теле. Это накладывает пять ограничений на относительное движение звеньев, которое, следовательно, имеет одну степень свободы. Эта степень свободы — расстояние скольжения вдоль линии.
Цилиндрическое сочленение требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле. Это комбинация вращательного сочленения и скользящего сочленения. Это сочленение имеет две степени свободы. Положение движущегося тела определяется как вращением вокруг оси, так и скольжением вдоль нее.
Сферический шарнир, или шаровой шарнир, требует, чтобы точка в движущемся теле поддерживала контакт с точкой в неподвижном теле. Этот шарнир имеет три степени свободы.
Плоский шарнир требует, чтобы плоскость в движущемся теле поддерживала контакт с плоскостью в неподвижном теле. Этот шарнир имеет три степени свободы.
Высшие пары
В общем, более высокая пара — это ограничение, которое требует, чтобы кривая или поверхность в движущемся теле поддерживали контакт с кривой или поверхностью в неподвижном теле. Например, контакт между кулачком и его следящим элементом — это более высокая пара, называемая кулачковым соединением . Аналогично, контакт между эвольвентными кривыми, которые образуют зацепляющиеся зубья двух шестерен, — это кулачковые соединения.
Кинематические цепи
Иллюстрация четырехзвенного шарнирного механизма из «Кинематики машин», 1876 г.
Твердые тела («звенья»), соединенные кинематическими парами («суставами»), называются кинематическими цепями . Механизмы и роботы являются примерами кинематических цепей. Степень свободы кинематической цепи вычисляется из числа звеньев, а также числа и типа сочленений с использованием формулы подвижности . Эту формулу также можно использовать для перечисления топологий кинематических цепей, имеющих заданную степень свободы, что в машиностроении известно как синтез типа .
Примеры
Плоские одностепенные шарнирные соединения, собранные из N звеньев и j шарниров или скользящих соединений, следующие:
N = 2, j = 1: двухзвенная связь, являющаяся рычагом;
N = 6, j = 7: шестизвенная связь . Она должна иметь два звена («тройные связи»), которые поддерживают три сочленения. Существуют две различные топологии, которые зависят от того, как соединены две тройные связи. В топологии Уатта две тройные связи имеют общий сочленение; в топологии Стефенсона две тройные связи не имеют общего сочленения и соединены бинарными связями. [28]
N = 8, j = 10: восьмизвенная шарнирная система с 16 различными топологиями;
N = 10, j = 13: десятизвенная связь с 230 различными топологиями;
N = 12, j = 16: двенадцатистержневая связь с 6856 топологиями.
Для более крупных цепей и топологий их связей см. RP Sunkari и LC Schmidt , «Структурный синтез плоских кинематических цепей путем адаптации алгоритма типа Маккея», Mechanism and Machine Theory #41, стр. 1021–1030 (2006).
^ https://www.youtube.com/watch?v=jLJLXka2wEM Ускоренный курс по физике интегралов
^ https://www.mathsisfun.com/algebra/trig-area-triangle-without-right-angle.html Площадь треугольников без прямых углов
^ kinematics.gif (508×368) (Изображение) . Получено 3 ноября 2023 г. .
^ Рёло, Ф .; Кеннеди, Алекс Б. В. (1876), Кинематика машин: Очерки теории машин, Лондон: Macmillan
^ Геометрия: изучение свойств заданных элементов, которые остаются инвариантными при заданных преобразованиях. «Определение геометрии». Онлайн-словарь Merriam-Webster. 31 мая 2023 г.
^ Пол, Ричард (1981). Роботы-манипуляторы: математика, программирование и управление: компьютерное управление роботами-манипуляторами. MIT Press, Кембридж, Массачусетс. ISBN978-0-262-16082-7.
^ Р. Дуглас Грегори (2006). Глава 16. Кембридж, Англия: Кембриджский университет. ISBN0-521-82678-0.
^ Уильям Томсон Кельвин и Питер Гатри Тейт (1894). Элементы натуральной философии. Cambridge University Press. стр. 4. ISBN1-57392-984-0.
^ Уильям Томсон Кельвин и Питер Гатри Тейт (1894). Элементы натуральной философии. стр. 296.
^ М. Фогель (1980). "Проблема 17-11". Решатель задач механики . Ассоциация исследований и образования. стр. 613. ISBN0-87891-519-2.
^ Моррис Клайн (1990). Математическая мысль от древних времен до наших дней . Oxford University Press. стр. 472. ISBN0-19-506136-5.
^ Филлипс, Джек (2007). Свобода в машиностроении, тома 1–2 (переиздание). Cambridge University Press. ISBN978-0-521-67331-0.
^ Цай, Лунг-Вен (2001). Конструкция механизма: перечисление кинематических структур в соответствии с функцией (иллюстрированное издание). CRC Press. стр. 121. ISBN978-0-8493-0901-4.
^ Хотя τ используется как переменная интегрирования, некоторые авторы могут использовать t′ как переменную интегрирования, хотя это можно спутать с обозначением Лагранжа для производных [14]
Дальнейшее чтение
Koetsier, Teun (1994), "§8.3 Кинематика", в Grattan-Guinness, Ivor (ред.), Companion Encyclopedia of the History and Philosophy of the Mathematical Sciences , т. 2, Routledge , стр. 994–1001, ISBN 0-415-09239-6
Moon, Francis C. (2007). Машины Леонардо да Винчи и Франца Рело, Кинематика машин от эпохи Возрождения до 20-го века . Springer. ISBN 978-1-4020-5598-0.
Эдуард Штуд (1913) переводчик Д. Х. Дельфенич, «Основы и задачи аналитической кинематики».
Внешние ссылки
Найдите информацию о кинематике в Викисловаре, бесплатном словаре.
На Викискладе есть медиафайлы по теме «Кинематика» .
Java-апплет 1D-кинематики
Physclips: Механика с анимациями и видеоклипами от Университета Нового Южного Уэльса.
Цифровая библиотека кинематических моделей для проектирования (KMODDL), содержащая фильмы и фотографии сотен работающих моделей механических систем Корнелльского университета , а также электронную библиотеку классических текстов по машиностроению и проектированию.
Микродюймовое позиционирование с кинематическими компонентами



































































































![{\displaystyle [T(\phi,\mathbf {d})]={\begin{bmatrix}A(\phi) &\mathbf {d} \\\mathbf {0} &1\end{bmatrix}}={ \begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\\\sin \phi &\cos \phi &d_{y}\\0&0&1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50078656eb1b2395a2ad84383cd16868c54649b1)
![{\displaystyle \mathbf {P} =[T(\phi,\mathbf {d})]\mathbf {r} = {\begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\\ \sin \phi &\cos \phi &d_{y}\\0&0&1\end{bmatrix}}{\begin{bmatrix}x\\y\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9654bfae7e5d0f825ec57848bd5ab493f408804f)
![{\displaystyle \mathbf {r} (t)=[T(0,\mathbf {d} (t))]\mathbf {p} =\mathbf {d} (t)+\mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/32f22d9b4fcc015f80b746db422f93b8d8d145dc)

![{\displaystyle \mathbf {P} (t)=[A(t)]\mathbf {p} ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a4e865fc0f6be2e59e479f4b0a03f8114971382)
![{\displaystyle [A(t)]={\begin{bmatrix}\cos(\theta (t))&-\sin(\theta (t))\\\sin(\theta (t))&\cos(\theta (t))\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/53916525d50fa175a581d579e61b62d7d8a4610d)
![{\displaystyle \mathbf {v} _{P}={\dot {\mathbf {P} }}=[{\dot {A}}(t)]\mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/701dae17b9e581be69746145fd6133e7f07f2f16)
![{\displaystyle \mathbf {v} _{P}=[{\dot {A}}(t)][A(t)^{-1}]\mathbf {P} =[\Omega ]\mathbf {P } ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8fac9117de99ee6837c171f5f46eede17890bcba)
![{\displaystyle [\Omega ]={\begin{bmatrix}0&-\omega \\\omega &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eed637d1916abe2a271e19c744c416d1cf20e4f0)

![{\displaystyle \mathbf {A} _{P}={\ddot {P}}(t)=[{\dot {\Omega }}]\mathbf {P} +[\Omega ]{\dot {\mathbf {P} }},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62a4ca56d89ccc6d2ec6d0daffd6907b9c47ccd5)
![{\displaystyle \mathbf {A} _{P}=[{\dot {\Omega }}]\mathbf {P} +[\Omega ][\Omega ]\mathbf {P},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50d611f89cc9b7358cec772370a6ee8d79a792a9)
![{\displaystyle [{\dot {\Omega }}]={\begin{bmatrix}0&-\alpha \\\alpha &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d6ebb7e70e2d2370e781ee86ea55cd0fb7d469d7)







![{\displaystyle \mathbf {P} (t)=[T(t)]\mathbf {p} ={\begin{bmatrix}\mathbf {P} \\1\end{bmatrix}}={\begin{bmatrix}A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e928b50529956cc7ca762cee6969f7321c5cf9d)
![{\displaystyle \mathbf {p} =[T(t)]^{-1}\mathbf {P} (t)={\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}={\begin{bmatrix}A(t)^{\text{T}}&-A(t)^{\text{T}}\mathbf {d} (t)\\0&1\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e1aa622ad90b69b42880d95b90afb0b27407a60)
![{\displaystyle [A(t)]^{\text{T}}[A(t)]=I.\!}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e132dec7e35a3f7b5135d601bb20851ce2abe646)
![{\displaystyle \mathbf {v} _{P}=[{\dot {T}}(t)]\mathbf {p} ={\begin{bmatrix}\mathbf {v} _{P}\\0\end{bmatrix}}=\left({\frac {d}{dt}}{\begin{bmatrix}A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}\right){\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}={\begin{bmatrix}{\dot {A}}(t)&{\dot {\mathbf {d} }}(t)\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d216e15ab36a895fa2fa109fbdf77b9590d5ccb)
![{\displaystyle {\begin{aligned}\mathbf {v} _{P}&=[{\dot {T}}(t)][T(t)]^{-1}\mathbf {P} (t)\\[4pt]&={\begin{bmatrix}\mathbf {v} _{P}\\0\end{bmatrix}}={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}A&\mathbf {d} \\0&1\end{bmatrix}}^{-1}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}A^{-1}{\begin{bmatrix}1&-\mathbf {d} \\0&A\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}A^{-1}&-{\dot {A}}A^{-1}\mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}A^{\text{T}}&-{\dot {A}}A^{\text{T}}\mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[6pt]\mathbf {v} _{P}&=[S]\mathbf {P} .\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6aa70149e117b2b14b1f6d473dd453dc5530c7e6)
![{\displaystyle [S]={\begin{bmatrix}\Omega &-\Omega \mathbf {d} + {\dot {\mathbf {d} }}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/90d988bfd6ff36b285d6294bf167b63d5f91bdef)
![{\displaystyle [\Omega ]={\dot {A}}A^{\text{T}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/21d0117f60aeca689c59abbfe4b88b1a287a1b63)
+{\dot {\mathbf {d} }}=\omega \times \mathbf { R} _{P/O}+\mathbf {v} _{O},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/127655f82eb90e56b116afbcf8aa567b908e516b)


![{\displaystyle \mathbf {A} _{P}={\frac {d}{dt}}\mathbf {v} _{P}={\frac {d}{dt}}\left([S]\ mathbf {P} \right)=[{\dot {S}}]\mathbf {P} +[S]{\dot {\mathbf {P} }}=[{\dot {S}}]\mathbf { P} +[S][S]\mathbf {P} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/80998957f2829ada7a5e77e2fb68a31285e843cb)
![{\displaystyle [{\dot {S}}]={\begin{bmatrix}{\dot {\Omega }} &-{\dot {\Omega }}\mathbf {d} -\Omega {\dot {\ mathbf {d} }}+{\ddot {\mathbf {d} }}\\0&0\end{bmatrix}}={\begin{bmatrix}{\dot {\Omega }}&-{\dot {\Omega }}\mathbf {d} -\Omega \mathbf {v} _{O}+\mathbf {A} _{O}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4a39702184d0f72216205c32ebcfa8e0e9c3b478)
![{\displaystyle [S]^{2}={\begin{bmatrix}\Omega &-\Omega \mathbf {d} +\mathbf {v} _{O}\\0&0\end{bmatrix}}^{2 }={\begin{bmatrix}\Omega ^{2}&-\Omega ^{2}\mathbf {d} +\Omega \mathbf {v} _{O}\\0&0\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/557b35e24d57f15d0c9d2998053809be7105a2f9)




