Раздел физики, описывающий движение объектов без учета сил.
Кинематика — раздел физики , развитый в классической механике , который описывает движение точек, тел (объектов) и систем тел (групп объектов) без учета сил , вызывающих их движение. [1] [2] [3] Кинематику, как область исследования, часто называют «геометрией движения» и иногда рассматривают как раздел математики . [4] [5] [6] Задача кинематики начинается с описания геометрии системы и объявления начальных условий любых известных значений положения, скорости и/или ускорения точек внутри системы. Затем, используя аргументы геометрии, можно определить положение, скорость и ускорение любых неизвестных частей системы. Изучение того, как силы действуют на тела, относится к кинетике , а не кинематике. Более подробную информацию см. в разделе «Аналитическая динамика» .
Термин «кинематика» — это английская версия « кинематики » А. М. Ампера [9] , которую он сконструировал от греческого κίνημα kinema («движение, движение»), которое в свою очередь происходит от κινεῖν kinein («перемещаться»). [10] [11]
Kinematic и cinématique связаны с французским словом cinéma, но не являются производными от него напрямую. Однако у них есть общий корень, поскольку кино произошло от сокращенной формы слова cinématographe, «кинопроектор и камера», опять-таки от греческого слова, обозначающего движение, и от греческого γρᾰ́φωgrapho ( «писать»). [12]
Кинематика траектории частицы во вращающейся системе отсчета
Кинематические величины классической частицы: масса m , положение r , скорость v , ускорение a .
Кинематические векторы в плоских полярных координатах. Обратите внимание, что установка не ограничивается двухмерным пространством, а плоскостью в любом более высоком измерении.
Кинематика частиц - это изучение траектории частиц. Положение частицы определяется как вектор координат от начала системы координат до частицы. Например, рассмотрим башню в 50 м к югу от вашего дома, где центр системы координат находится в вашем доме, так что восток находится в направлении оси X , а север - в направлении оси Y , тогда координата вектор к основанию башни равен r = (0 м, −50 м, 0 м). Если высота башни 50 м и эта высота измеряется по оси z , то вектор координат вершины башни равен r = (0 м, −50 м, 50 м).
В самом общем случае для определения положения частицы используется трехмерная система координат. Однако, если частица вынуждена двигаться внутри плоскости, достаточно двумерной системы координат. Все наблюдения в физике неполны, если они не описаны относительно системы отсчета.
Вектор положения частицы — это вектор , проведенный от начала системы отсчета до частицы. Он выражает как расстояние точки от начала координат, так и ее направление от начала координат. В трех измерениях вектор положения можно выразить как
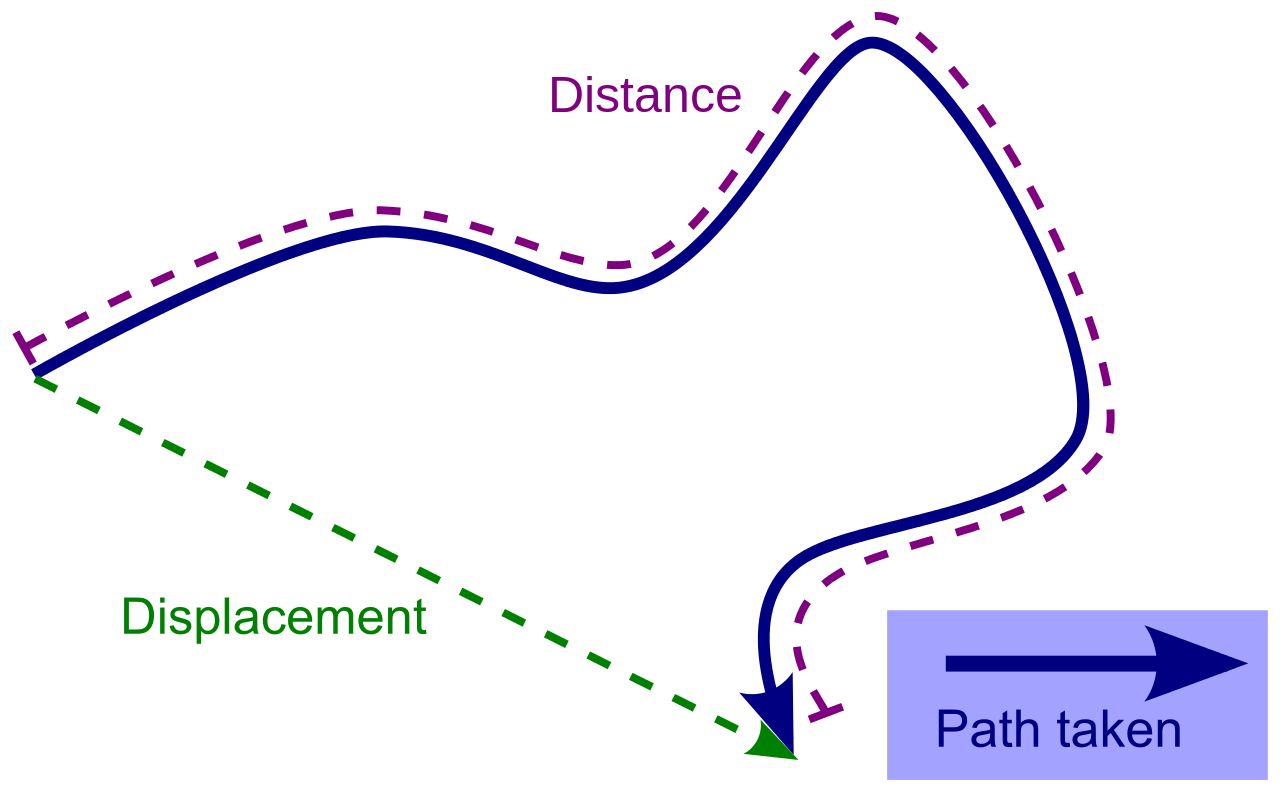
Траектория частицы является векторной функцией времени, которая определяет кривую, по которой движется движущаяся частица, определяемую выражением
Пройденное расстояние всегда больше или равно перемещению.
Скорость и скорость
Скорость частицы — это векторная величина, которая описывает как направление , так и величину движения частицы. С математической точки зрения, скорость изменения вектора положения точки относительно времени — это скорость точки. Рассмотрим соотношение, образующееся при делении разности двух положений частицы ( перемещения ) на интервал времени. Это отношение называется средней скоростью за этот интервал времени и определяется как
Скорость объекта – это величина его скорости . Это скалярная величина:
Ускорение
Вектор скорости может изменяться по величине и направлению или по тому и другому одновременно. Следовательно, ускорение учитывает как скорость изменения величины вектора скорости, так и скорость изменения направления этого вектора. Те же рассуждения, которые использовались в отношении положения частицы для определения скорости, могут быть применены к скорости для определения ускорения. Ускорение частицы — это вектор , определяемый скоростью изменения вектора скорости. Среднее ускорение частицы за интервал времени определяется как соотношение.
vt
Ускорение частицы является пределом среднего ускорения, когда временной интервал приближается к нулю, что является производной по времени,
Альтернативно,
Таким образом, ускорение — это первая производная вектора скорости и вторая производная вектора положения этой частицы. В невращающейся системе отсчета производные координатных направлений не рассматриваются, поскольку их направления и величины являются постоянными.
Величина ускорения объекта равна величине | а | вектора его ускорения. Это скалярная величина:
Вектор относительного положения
Вектор относительного положения — это вектор, который определяет положение одной точки относительно другой. Это разница в положении двух точек. Положение одной точки А относительно другой точки В — это просто разница между их положениями.
что представляет собой разницу между компонентами их векторов положения.
Если точка А имеет компоненты положения
и точка B имеет компоненты положения
тогда положение точки А относительно точки В есть разность их составляющих:
Относительная скорость
Относительные скорости между двумя частицами в классической механике.
Скорость одной точки относительно другой — это просто разность их скоростей.
Если точка A имеет компоненты скорости , а точка B имеет компоненты скорости, то скорость точки A относительно точки B равна разнице между их компонентами:
Альтернативно, тот же самый результат может быть получен путем вычисления производной по времени вектора относительного положения r B/A .
Относительное ускорение
Ускорение одной точки C относительно другой точки B — это просто разность их ускорений.
Если точка C имеет компоненты ускорения
, а точка B имеет компоненты ускорения,
то ускорение точки C относительно точки B равно разнице между их компонентами:
Альтернативно, тот же самый результат может быть получен путем вычисления второй производной по времени вектора относительного положения r B/A . [13]
Предполагая, что начальные условия положения и скорости во времени известны, первое интегрирование дает скорость частицы как функцию времени. [а]
Второе интегрирование дает его путь (траекторию),
Можно вывести дополнительные зависимости между перемещением, скоростью, ускорением и временем. Поскольку ускорение постоянно,
Взаимосвязь между скоростью, положением и ускорением без явной зависимости от времени можно получить, решив среднее ускорение для времени, заменив и упростив
В случае ускорения всегда по направлению движения и направление движения должно быть положительным или отрицательным, угол между векторами ( α ) равен 0, поэтому , и
Это сводит параметрические уравнения движения частицы к декартовой зависимости скорости от положения. Это соотношение полезно, когда время неизвестно. Мы также знаем, что или — это площадь под графиком скорости от времени. [15]
График физики скорости и времени
Мы можем взять , добавив верхнюю и нижнюю области. Нижняя область представляет собой прямоугольник, а площадь прямоугольника — это ширина и высота. В данном случае и ( здесь отличается от ускорения ). Это означает, что нижняя область равна . Теперь найдем верхнюю область (треугольник). Площадь треугольника – это основание и высота. [16] В этом случае и или . Сложение и приводит к уравнению . [17] Это уравнение применимо, когда конечная скорость v неизвестна.
Рисунок 2: Скорость и ускорение при неравномерном круговом движении: вектор скорости направлен по касательной к орбите, но вектор ускорения не направлен радиально внутрь из-за его тангенциальной составляющей a θ , которая увеличивает скорость вращения: d ω /d t = | а θ |/ р .
Траектории частиц в цилиндрическо-полярных координатах
Часто бывает удобно сформулировать траекторию частицы r ( t ) = ( x ( t ), y ( t ), z ( t )) с использованием полярных координат в плоскости X – Y. В этом случае его скорость и ускорение принимают удобный вид.
Напомним , что траектория частицы P определяется ее вектором координат r , измеренным в фиксированной системе отсчета F. Когда частица движется, ее координатный вектор r ( t ) отслеживает ее траекторию, которая представляет собой кривую в пространстве, определяемую формулой:
Рассмотрим частицу P , которая движется только по поверхности круглого цилиндра r ( t ) = константа, можно совместить ось z неподвижной рамки F с осью цилиндра. Затем угол θ вокруг этой оси в плоскости x – y можно использовать для определения траектории как:
rθt
Цилиндрические координаты для r ( t ) можно упростить, введя радиальные и тангенциальные единичные векторы:
Используя эти обозначения, r ( t ) принимает форму:
rtR
rθzv Prt
Аналогично ускорение a P , которое является производной скорости v P по времени , определяется выражением:
Этот термин действует по направлению к центру кривизны пути в этой точке пути и обычно называется центростремительным ускорением . Этот термин называется ускорением Кориолиса .
Постоянный радиус
Если траектория частицы ограничена цилиндром, то радиус r постоянен, а векторы скорости и ускорения упрощаются. Скорость v P — это производная по времени траектории r ( t ),
Плоские круговые траектории
Каждая частица на колесе движется по плоской круговой траектории («Кинематика машин», 1876 г.). [18]
Частный случай траектории частицы по круговому цилиндру возникает при отсутствии движения вдоль оси z :
Ускорение a P частицы P теперь определяется выражением:
Компоненты
радиальнойтангенциальной составляющими
Обозначения угловой скорости и углового ускорения часто определяются как
Траектории точек тела, движущегося в плоскости.
Движение компонентов механической системы анализируется путем прикрепления системы отсчета к каждой детали и определения того, как различные системы отсчета движутся относительно друг друга. Если конструктивная жесткость деталей достаточна, то их деформацией можно пренебречь и для определения этого относительного движения использовать жесткие преобразования. Это сводит описание движения различных частей сложной механической системы к задаче описания геометрии каждой части и геометрической связи каждой части относительно других частей.
Геометрия — это изучение свойств фигур, которые остаются неизменными, пока пространство трансформируется различными способами; более технически, это изучение инвариантов при ряде преобразований. [19] Эти преобразования могут вызвать смещение треугольника в плоскости, оставив при этом угол при вершине и расстояния между вершинами неизменными. Кинематику часто называют прикладной геометрией, в которой движение механической системы описывается с помощью жестких преобразований евклидовой геометрии.
Координаты точек на плоскости представляют собой двумерные векторы в R 2 (двумерном пространстве). Жесткие преобразования — это преобразования, сохраняющие расстояние между любыми двумя точками. Множество жестких преобразований в n - мерном пространстве называется специальной евклидовой группой на Rn и обозначается SE( n ) .
Перемещения и движение
Движение каждого из компонентов паровой машины Бултона и Уатта (1784 г.) моделируется непрерывным набором жестких перемещений.
Положение одного компонента механической системы относительно другого определяется путем введения системы отсчета, скажем , M в одном из них, который перемещается относительно фиксированной системы F в другом. Жесткая трансформация или смещение M относительно F определяет относительное положение двух компонентов. Смещение состоит из комбинации вращения и перемещения .
Совокупность всех перемещений M относительно F называется конфигурационным пространством M. Гладкая кривая из одного положения в другое в этом конфигурационном пространстве представляет собой непрерывный набор смещений, называемый движением M относительно F. Движение M относительно F. тело состоит из непрерывной совокупности вращений и перемещений.
Матричное представление
Комбинация вращения и перемещения в плоскости R 2 может быть представлена матрицей определенного типа 3×3, известной как однородное преобразование. Однородное преобразование 3×3 строится из матрицы вращения A ( φ ) 2×2 и вектора перемещения 2×1 d = ( d x , d y ), как:
zrxy
В частности, пусть r определяет координаты точек в системе отсчета M , совпадающих с фиксированной системой отсчета F . Затем, когда начало координат M смещается вектором перемещения d относительно начала координат F и поворачивается на угол φ относительно оси x F , новые координаты в F точек в M определяются как:
Гомогенные преобразования представляют собой аффинные преобразования . Эта формулировка необходима, поскольку трансляция не является линейным преобразованием R 2 . Однако при использовании проективной геометрии, так что R 2 считается подмножеством R 3 , трансляции становятся аффинными линейными преобразованиями. [20]
Чистый перевод
Если твердое тело движется так, что его система отсчета M не вращается ( θ = 0) относительно неподвижной системы F , движение называется чистым перемещением. В этом случае траектория каждой точки тела является смещением траектории d ( t ) начала координат M, то есть:
Таким образом, для тел в чистом поступлении скорость и ускорение каждой точки P в теле определяются выражением:
v Oa OMpM
Вращение тела вокруг неподвижной оси
Рисунок 1: Вектор угловой скорости Ω направлен вверх при вращении против часовой стрелки и вниз при вращении по часовой стрелке, как указано в правиле правой руки . Угловое положение θ ( t ) меняется со временем со скоростью ω ( t ) знак равно d θ /d t .
Вращательная или угловая кинематика — это описание вращения объекта. [21] Далее внимание ограничивается простым вращением вокруг оси фиксированной ориентации. Ось Z выбрана для удобства.
Позиция
Это позволяет описать вращение как угловое положение плоской системы отсчета M относительно фиксированной F вокруг этой общей оси z . Координаты p = ( x , y ) в M связаны с координатами P = (X, Y) в F матричным уравнением:
где
MF
Скорость
Если точка p не движется в M , ее скорость в F определяется выражением
pPt
MFωθ
Ускорение
Ускорение P ( t ) в F получается как производная скорости по времени,
MF
Тогда описание вращения включает в себя эти три величины:
Угловое положение : ориентированное расстояние от выбранного начала координат на оси вращения до точки объекта представляет собой вектор r ( t ), определяющий точку. Вектор r ( t ) имеет некоторую проекцию (или, что то же самое, некоторую компоненту) r⊥ ( t ) на плоскость, перпендикулярную оси вращения. Тогда угловое положение этой точки — это угол θ от базовой оси (обычно положительной оси x ) к вектору r ⊥ ( t ) в известном направлении вращения (обычно задаваемом правилом правой руки ).
Угловая скорость : угловая скорость ω — это скорость, с которой угловое положение θ изменяется по отношению ко времени t :
Угловая скорость представлена на рисунке 1 вектором Ω , направленным вдоль оси вращения с величиной ω и смыслом, определяемым направлением вращения, заданным правилом правой руки .
Угловое ускорение : величина углового ускорения α — это скорость, с которой угловая скорость ω изменяется по отношению ко времени t :
Уравнения поступательной кинематики можно легко расширить до плоской кинематики вращения для постоянного углового ускорения с простыми заменами переменных:
Здесь θi и θf — соответственно начальное и конечное угловые положения, ωi и ωf — соответственно начальная и конечная угловые скорости, а α — постоянное угловое ускорение . Хотя положение в пространстве и скорость в пространстве являются истинными векторами (с точки зрения их свойств при вращении), как и угловая скорость, угол сам по себе не является истинным вектором.
Траектории точек в теле, движущемся в трех измерениях
Важные формулы кинематики определяют скорость и ускорение точек движущегося тела, когда они прослеживают траектории в трехмерном пространстве. Это особенно важно для центра масс тела, который используется для вывода уравнений движения с использованием либо второго закона Ньютона , либо уравнений Лагранжа .
Позиция
Для определения этих формул движение компонента B механической системы определяется набором вращений [A( t )] и трансляций d ( t ), собранных в однородное преобразование [T( t )]=[A ( т ), д ( т )]. Если p — координаты точки P в B , измеренные в движущейся системе отсчета M , то траектория этой точки, прослеживаемая в F , определяется выражением:
PP
Это уравнение траектории P можно инвертировать для вычисления координатного вектора p в M следующим образом:
Скорость
Скорость точки P вдоль ее траектории P ( t ) получается как производная по времени этого вектора положения,
p
Эту формулу можно изменить , чтобы получить скорость P , воздействуя на его траекторию P ( t ), измеренную в фиксированной системе отсчета F. Подстановка обратного преобразования для p в уравнение скорости дает:
S
Умножая на оператор [ S ], формула для скорости v P принимает вид:
ω
POM
O.
Ускорение
Ускорение точки P в движущемся теле B находится как производная по времени ее вектора скорости:
Это уравнение можно сначала расширить, вычислив
Формулу ускорения AP теперь можно получить как :
α
POM
M.
Кинематические ограничения
Кинематические ограничения — это ограничения на движение компонентов механической системы. Можно считать, что кинематические ограничения имеют две основные формы: (i) ограничения, возникающие из шарниров, ползунков и кулачковых соединений, которые определяют конструкцию системы, называемые голономными ограничениями , и (ii) ограничения, налагаемые на скорость системы, такие как ограничение ножевого края коньков по плоской плоскости или катание без проскальзывания диска или сферы, контактирующих с плоскостью, которые называются неголономными ограничениями . Ниже приведены некоторые распространенные примеры.
Кинематическая муфта
Кинематическая муфта точно ограничивает все 6 степеней свободы.
Катиться без скольжения
Объект, катящийся по поверхности без скольжения, подчиняется условию, что скорость его центра масс равна векторному произведению его угловой скорости на вектор от точки контакта к центру масс:
Для случая объекта, который не наклоняется и не поворачивается, это значение уменьшается до .
Нерастяжимый шнур
Это тот случай, когда тела соединены идеализированной нитью, которая остается в натянутом состоянии и не может изменить длину. Ограничение состоит в том, что сумма длин всех отрезков шнура равна общей длине, и соответственно производная по времени от этой суммы равна нулю. [22] [23] [24] Динамическая задача такого типа — маятник . Другой пример — барабан, вращающийся под действием силы тяжести под действием падающего груза, прикрепленного к ободу нерастяжимым шнуром. [25] Задача равновесия (т.е. не кинематическая) такого типа — это цепная цепь . [26]
Кинематические пары
Рело назвал идеальные связи между компонентами, образующими кинематические пары машины . Он различал высшие пары, которые, как утверждается, имеют линейный контакт между двумя звеньями, и низшие пары, которые имеют пространственный контакт между звеньями. Дж. Филлипс показывает, что существует множество способов построения пар, не подпадающих под эту простую классификацию. [27]
Нижняя пара
Нижняя пара — это идеальный сустав, или голономная связь, которая поддерживает контакт между точкой, линией или плоскостью движущегося твердого (трехмерного) тела с соответствующей точечной линией или плоскостью в неподвижном твердом теле. Бывают следующие случаи:
Вращающаяся пара, или шарнирное соединение, требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, перпендикулярная этой линии в движущемся теле, поддерживала контакт с аналогичной перпендикулярной плоскостью. в фиксированном теле. Это накладывает пять ограничений на относительное перемещение звеньев, которое, следовательно, имеет одну степень свободы, то есть чистое вращение вокруг оси шарнира.
Призматическое соединение , или ползун, требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле, а плоскость, параллельная этой линии в движущемся теле, сохраняла контакт с аналогичной параллельной плоскостью в фиксированное тело. Это накладывает пять ограничений на относительное перемещение звеньев, которые, следовательно, имеют одну степень свободы. Эта степень свободы представляет собой расстояние скольжения вдоль линии.
Цилиндрическое соединение требует, чтобы линия или ось в движущемся теле оставалась коллинеарной с линией в неподвижном теле. Это комбинация вращающегося и скользящего соединения. Этот сустав имеет две степени свободы. Положение движущегося тела определяется как вращением вокруг оси, так и скольжением вдоль нее.
Сферический шарнир или шаровой шарнир требует, чтобы точка движущегося тела поддерживала контакт с точкой неподвижного тела. Этот сустав имеет три степени свободы.
Плоское соединение требует, чтобы плоскость движущегося тела поддерживала контакт с плоскостью неподвижного тела. Этот сустав имеет три степени свободы.
Старшие пары
Вообще говоря, высшая пара — это ограничение, которое требует, чтобы кривая или поверхность движущегося тела поддерживала контакт с кривой или поверхностью неподвижного тела. Например, контакт между кулачком и его толкателем представляет собой высшую пару, называемую кулачковым соединением . Аналогично контакт между эвольвентными кривыми, образующими зацепляющиеся зубья двух шестерен, представляет собой кулачковые соединения.
Кинематические цепи
Иллюстрация четырехзвенной связи из книги «Кинематика машин», 1876 г.
Твердые тела («звенья»), соединенные кинематическими парами («сочленениями»), называются кинематическими цепями . Механизмы и роботы являются примерами кинематических цепей. Степень свободы кинематической цепи вычисляется по числу звеньев, количеству и типу соединений по формуле подвижности . Эту формулу можно также использовать для перечисления топологий кинематических цепей, имеющих заданную степень свободы, что в проектировании машин известно как синтез типов .
Примеры
Плоские тяги с одной степенью свободы, собранные из N звеньев и j шарниров или скользящих соединений, представляют собой:
N = 6, j = 7: шестизвенная навеска . Он должен иметь два звена («тройные звенья»), которые поддерживают три соединения. Существуют две различные топологии, которые зависят от того, как соединены две тройные связи. В топологии Ватта две тройные связи имеют общее соединение; в топологии Стивенсона два тройных звена не имеют общего соединения и соединены бинарными звеньями. [28]
N = 8, j = 10: восьмизвенная связь с 16 различными топологиями;
N = 10, j = 13: десятизвенная связь с 230 различными топологиями;
N = 12, j = 16: двенадцатизвенная связь с 6856 топологиями.
О более крупных цепях и топологиях их связей см. RP Sunkari и LC Schmidt , «Структурный синтез плоских кинематических цепей путем адаптации алгоритма типа Маккея», Mechanism and Machine Theory # 41, стр. 1021–1030 (2006).
^ Джозеф Стайлз Беггс (1983). Кинематика. Тейлор и Фрэнсис. п. 1. ISBN0-89116-355-7.
^ Томас Уоллес Райт (1896). Элементы механики, включая кинематику, кинетику и статику. Э и ФН Спон. Глава 1.
^ Рассел К. Хиббелер (2009). «Кинематика и кинетика частицы». Инженерная механика: Динамика (12-е изд.). Прентис Холл. п. 298. ИСБН978-0-13-607791-6.
^ Ахмед А. Шабана (2003). «Справочная кинематика». Динамика систем многих тел (2-е изд.). Издательство Кембриджского университета. ISBN978-0-521-54411-5.
^ ПП Теодореску (2007). «Кинематика». Механические системы, классические модели: механика частиц . Спрингер. п. 287. ИСБН978-1-4020-5441-9..
^ А. Бивенер (2003). Передвижение животных. Издательство Оксфордского университета. ISBN019850022X.
^ Дж. М. Маккарти и Г. С. Со, 2010, Геометрический дизайн связей, Спрингер, Нью-Йорк.
^ 2.4 Интеграция, MIT, заархивировано из оригинала 13 ноября 2021 г. , получено 4 июля 2021 г.
^ https://www.youtube.com/watch?v=jLJLXka2wEM Интегралы физики ускоренного курса
^ https://www.mathsisfun.com/algebra/trig-area-triangle-without-right-angle.html Площадь треугольников без прямых углов
^ kinematics.gif (508×368) (Изображение) . Проверено 3 ноября 2023 г.
^ Рело, Ф .; Кеннеди, Алекс Б.В. (1876), Кинематика машин: Очерки теории машин , Лондон: Macmillan
^ Геометрия: изучение свойств данных элементов, которые остаются неизменными при определенных преобразованиях. «Определение геометрии». Онлайн-словарь Мерриам-Вебстера. 31 мая 2023 г.
^ Пол, Ричард (1981). Роботы-манипуляторы: математика, программирование и управление: компьютерное управление роботами-манипуляторами. MIT Press, Кембридж, Массачусетс. ISBN978-0-262-16082-7.
^ Р. Дуглас Грегори (2006). Глава 16. Кембридж, Англия: Кембриджский университет. ISBN0-521-82678-0.
^ Уильям Томсон Кельвин и Питер Гатри Тейт (1894). Элементы натуральной философии. Издательство Кембриджского университета. п. 4. ISBN1-57392-984-0.
^ Уильям Томсон Кельвин и Питер Гатри Тейт (1894). Элементы натуральной философии. п. 296.
^ М. Фогель (1980). «Задача 17-11». Решение задач по механике . Ассоциация исследований и образования. п. 613. ИСБН0-87891-519-2.
^ Церковь Ирвинга Портера (1908). Механика машиностроения. Уайли. п. 111. ИСБН1-110-36527-6.
^ Моррис Клайн (1990). Математическая мысль от древности до современности . Издательство Оксфордского университета. п. 472. ИСБН0-19-506136-5.
^ Филлипс, Джек (2007). Свобода в машинах, тома 1–2 (переиздание). Издательство Кембриджского университета. ISBN978-0-521-67331-0.
^ Цай, Лунг-Вэнь (2001). Проектирование механизмов: перечисление кинематических конструкций по функциям (иллюстрировано под ред.). ЦРК Пресс. п. 121. ИСБН978-0-8493-0901-4.
^ Хотя τ используется в качестве переменной интегрирования, некоторые авторы могут использовать t ' в качестве переменной интегрирования, хотя это можно спутать с обозначениями Лагранжа для производных [14]
дальнейшее чтение
Кутсер, Теун (1994), «§8.3 Кинематика», в Граттан-Гиннессе, Айвор (ред.), Сопутствующая энциклопедия истории и философии математических наук , том. 2, Рутледж , стр. 994–1001, ISBN.0-415-09239-6
Мун, Фрэнсис К. (2007). Машины Леонардо да Винчи и Франца Рело, Кинематика машин от Возрождения до XX века . Спрингер. ISBN 978-1-4020-5598-0.
Эдуард Этюд (1913) переводчик Д. Х. Дельфениха, "Основы и задачи аналитической кинематики".
Внешние ссылки
Поищите кинематику в Викисловаре, бесплатном словаре.
Викискладе есть медиафайлы по теме кинематики .
Java-апплет 1D-кинематики
Physclips: Механика с анимацией и видеоклипами от Университета Нового Южного Уэльса.
Цифровая библиотека кинематических моделей для проектирования (KMODDL), в которой представлены фильмы и фотографии сотен рабочих моделей механических систем Корнелльского университета , а также библиотека электронных книг с классическими текстами по механическому проектированию и машиностроению.
Микродюймовое позиционирование с помощью кинематических компонентов



































































































![{\displaystyle [T(\phi,\mathbf {d})]={\begin{bmatrix}A(\phi) &\mathbf {d} \\\mathbf {0} &1\end{bmatrix}}={ \begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\\\sin \phi &\cos \phi &d_{y}\\0&0&1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50078656eb1b2395a2ad84383cd16868c54649b1)
![{\displaystyle \mathbf {P} =[T(\phi,\mathbf {d})]\mathbf {r} = {\begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\\ \sin \phi &\cos \phi &d_{y}\\0&0&1\end{bmatrix}}{\begin{bmatrix}x\\y\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9654bfae7e5d0f825ec57848bd5ab493f408804f)
![{\ displaystyle \ mathbf {r} (t) = [T (0, \ mathbf {d} (t))] \ mathbf {p} = \ mathbf {d} (t) + \ mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/32f22d9b4fcc015f80b746db422f93b8d8d145dc)

![{\ displaystyle \ mathbf {P} (t) = [A (t)] \ mathbf {p},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a4e865fc0f6be2e59e479f4b0a03f8114971382)
![{\displaystyle [A(t)]={\begin{bmatrix}\cos(\theta (t))&-\sin(\theta (t))\\\sin(\theta (t))&\cos (\theta (t))\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/53916525d50fa175a581d579e61b62d7d8a4610d)
![{\displaystyle \mathbf {v} _{P}={\dot {\mathbf {P} }}=[{\dot {A}}(t)]\mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/701dae17b9e581be69746145fd6133e7f07f2f16)
![{\displaystyle \mathbf {v} _{P}=[{\dot {A}}(t)][A(t)^{-1}]\mathbf {P} =[\Omega ]\mathbf {P } ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8fac9117de99ee6837c171f5f46eede17890bcba)
![{\displaystyle [\Omega ]={\begin{bmatrix}0&-\omega \\\omega &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eed637d1916abe2a271e19c744c416d1cf20e4f0)

![{\displaystyle \mathbf {A} _{P}={\ddot {P}}(t)=[{\dot {\Omega }}]\mathbf {P} +[\Omega ]{\dot {\mathbf {П} }},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62a4ca56d89ccc6d2ec6d0daffd6907b9c47ccd5)
![{\displaystyle \mathbf {A} _{P}=[{\dot {\Omega }}]\mathbf {P} +[\Omega ][\Omega ]\mathbf {P},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50d611f89cc9b7358cec772370a6ee8d79a792a9)
![{\displaystyle [{\dot {\Omega }}]={\begin{bmatrix}0&-\alpha \\\alpha &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d6ebb7e70e2d2370e781ee86ea55cd0fb7d469d7)







![{\displaystyle \mathbf {P} (t)=[T(t)]\mathbf {p} = {\begin{bmatrix}\mathbf {P} \\1\end{bmatrix}} = {\begin{bmatrix }A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e928b50529956cc7ca762cee6969f7321c5cf9d)
![{\displaystyle \mathbf {p} =[T(t)]^{-1}\mathbf {P} (t)= {\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}= {\begin{bmatrix}A(t)^{\text{T}}&-A(t)^{\text{T}}\mathbf {d} (t)\\0&1\end{bmatrix}}{ \begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e1aa622ad90b69b42880d95b90afb0b27407a60)
![{\displaystyle [A(t)]^{\text{T}}[A(t)]=I.\!}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e132dec7e35a3f7b5135d601bb20851ce2abe646)
![{\displaystyle \mathbf {v} _{P}=[{\dot {T}}(t)]\mathbf {p} = {\begin{bmatrix}\mathbf {v} _{P}\\0\ end{bmatrix}}=\left({\frac {d}{dt}}{\begin{bmatrix}A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}\right) {\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}={\begin{bmatrix}{\dot {A}}(t)&{\dot {\mathbf {d} }}( t)\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d216e15ab36a895fa2fa109fbdf77b9590d5ccb)
![{\displaystyle {\begin{aligned}\mathbf {v} _{P}&=[{\dot {T}}(t)][T(t)]^{-1}\mathbf {P} (t )\\[4pt]&={\begin{bmatrix}\mathbf {v} _{P}\\0\end{bmatrix}}={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}A&\mathbf {d} \\0&1\end{bmatrix}}^{-1}{\begin{bmatrix}\ mathbf {P} (t)\\1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\ 0&0\end{bmatrix}}A^{-1}{\begin{bmatrix}1&-\mathbf {d} \\0&A\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\ \1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}A^{-1}&-{\dot {A}}A^{-1}\ mathbf {d} + {\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\ [4pt]&={\begin{bmatrix}{\dot {A}}A^{\text{T}}&-{\dot {A}}A^{\text{T}}\mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[6pt]\ mathbf {v} _{P}&=[S]\mathbf {P} .\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6aa70149e117b2b14b1f6d473dd453dc5530c7e6)
![{\displaystyle [S]={\begin{bmatrix}\Omega &-\Omega \mathbf {d} + {\dot {\mathbf {d} }}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/90d988bfd6ff36b285d6294bf167b63d5f91bdef)
![{\displaystyle [\Omega ]={\dot {A}}A^{\text{T}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/21d0117f60aeca689c59abbfe4b88b1a287a1b63)
+{\dot {\mathbf {d} }}=\omega \times \mathbf { R} _{P/O}+\mathbf {v} _{O},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/127655f82eb90e56b116afbcf8aa567b908e516b)


![{\displaystyle \mathbf {A} _{P}={\frac {d}{dt}}\mathbf {v} _{P}={\frac {d}{dt}}\left([S]\ mathbf {P} \right)=[{\dot {S}}]\mathbf {P} +[S]{\dot {\mathbf {P} }}=[{\dot {S}}]\mathbf { P} +[S][S]\mathbf {P} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/80998957f2829ada7a5e77e2fb68a31285e843cb)
![{\displaystyle [{\dot {S}}]={\begin{bmatrix}{\dot {\Omega }} &-{\dot {\Omega }}\mathbf {d} -\Omega {\dot {\ mathbf {d} }}+{\ddot {\mathbf {d} }}\\0&0\end{bmatrix}}={\begin{bmatrix}{\dot {\Omega }}&-{\dot {\Omega }}\mathbf {d} -\Omega \mathbf {v} _{O}+\mathbf {A} _{O}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4a39702184d0f72216205c32ebcfa8e0e9c3b478)
![{\displaystyle [S]^{2}={\begin{bmatrix}\Omega &-\Omega \mathbf {d} +\mathbf {v} _{O}\\0&0\end{bmatrix}}^{2 }={\begin{bmatrix}\Omega ^{2}&-\Omega ^{2}\mathbf {d} +\Omega \mathbf {v} _{O}\\0&0\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/557b35e24d57f15d0c9d2998053809be7105a2f9)




